使用.NET IoT驱动超声波测距传感器
时间:2022-12-14 00:30:00
背景
最近买了一堆传感器,先玩超声波测距传感器。超声波传感器一般用于机器人、汽车避障、物体测距、液位检测、停车检测等领域。
知识回顾
在我们开始之前,我们先复习一下高中的物理知识。
通过上图的原理图,已知声波速度,在这里取 340 m/s (1个标准大气压和15个空气中的音速℃340左右m/s)。
然后,我们通过记录发射时间和接收时间来计算间隔,然后根据(声速 * 时间间隔// 2 可以得到。
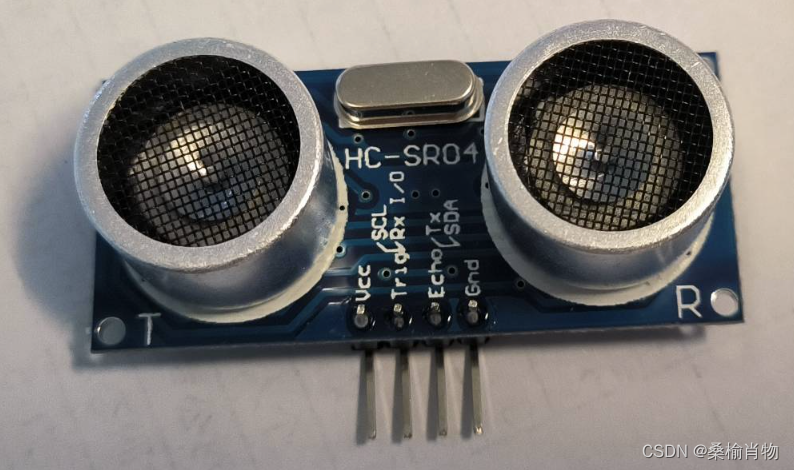
模块介绍
我用宽压模块。 3.3v -5 v,探测距离:2cm-450cm,有2cm超近盲区。精度0.3cm。
使用方法也很简单,一个控制口发出10US以上的高电平,就可以在接收口等待高电平输出。一有输出就记录一个开始时间,当此口变为低电平时再记录一个结束时间,他们的间隔时间就为此次测距的时间,根据公式便可算出距离。
接线测试
我在这里用的 Jetson TX2 开发版套件测试,针脚使用 38,和40。
38脚连 Trig ,输出模式; 40 脚连 Echo,设置为输入模式。
它还连接了 I2C 设备,一个SSD1306 OLED 显示屏,作为后续的距离显示,更详细的介绍可以看到我之前的文章使用.Net驱动Jetson Nano的OLED显示屏》。
因为上图没有找到 TX2 这就是为什么片 Nano。树莓派,Nano 和 TX2 物理引脚功能相同,但 PCM 编码和 GPIO 的编号是不一样的,代码有的情况下需要调整,后续会讲到。
我们先快速使用接线 Python 验证原理。
import RPi.GPIO as GPIO import time TRIG_PIN = 38 ECHO_PIN = 40 def main(): GPIO.setmode(GPIO.BOARD) GPIO.setup(TRIG_PIN, GPIO.OUT) GPIO.setup(ECHO_PIN, GPIO.IN) print("Demo running. Press CTRL C to exit.") try: while True: time.sleep(1) distance = StartModule() print("Distance: {}cm".format(distance)) finally: GPIO.cleanup() def StartModule(): # 发送 trig 信号,持续 10us 的方波脉冲 GPIO.output(TRIG_PIN,GPIO.HIGH) # 单位为 s ,10us 需转换 time.sleep(0.00001) GPIO.output(TRIG_PIN,GPIO.LOW) #等待低电平结束,记录时间 while GPIO
.
input
(ECHO_PIN
)
== GPIO
.LOW
:
pass pulse_s
= time
.time
(
)
#等待高电平结束,再次记录时间
while GPIO
.
input
(ECHO_PIN
)
== GPIO
.HIGH
:
pass pulse_e
= time
.time
(
)
# 测得距离(单位:m) = (pulse_end - pulse_start) * 声波速度 / 2
return
round
(
(pulse_e
- pulse_s
)
*
17000
,
2
)
if __name__
==
'__main__'
: main
(
)
.NET 实现
.NET IoT 库由两个 NuGet 包组成:
- System.Device.Gpio
- Iot.Device.Bindings
System.Device.Gpio 支持使用各种协议来与低级别硬件引脚交互,以控制设备。我编写的 Sang.IoT.SSD1306 就使用了这个库。
Iot.Device.Bindings 提供了各种常用的设备绑定,当然里面其实也是有 SSD13xx 的,如果不是想了解原理,可以不用重复造轮子,先前往支持的设备文档里面查询。
- 新建项目
dotnet new console -o ultrasonic
- 进入项目目录
cd ultrasonic
- 安装依赖库
dotnet add package Iot.Device.Bindings
- 修改代码
using System;
using System.Device.Gpio;
using System.Threading;
using Iot.Device.Hcsr04;
Console.WriteLine("Test sensor. Press Ctrl+C to end.");
// 此处注意 使用的是TX2设备,其他设备需查阅转换
int TRIG_GPIO = 394; //Pin 38
int ECHO_GPIO = 393; //Pin 40
using var controller = new GpioController();
using var sensor = new Hcsr04(controller,TRIG_GPIO,ECHO_GPIO);
while (true)
{
if(sensor.TryGetDistance(out _)){
Console.WriteLine($"Distance: {
sensor.Distance}");
}
Thread.Sleep(1000);
}
- 运行测试
dotnet run
以上便是 .NET 中的实现,如果你想验证下驱动原理,可以自行尝试用 .NET 编码实现。
这里需要注意的是,传入的 triggerPin 和 echoPin 是所用设备的 GPIO 编号,不是物理的针脚号,需要查阅资料获取。
针对本案例,使用的 38 和 40针脚,在树莓派中 GPIO 编号分别是 20和21,在 Jetson Nano 中分别是 77和78 ,在 Jetson TX2 中分别是 394和393。
接入显示屏
基于以上代码,我们引入包Sang.IoT.SSD1306。
dotnet add package Sang.IoT.SSD1306
修改代码
using System;
using System.Device.Gpio;
using System.Threading;
using Iot.Device.Hcsr04;
using Sang.IoT.SSD1306;
using SkiaSharp;
Console.WriteLine("Test sensor. Press Ctrl+C to end.");
// 此处注意 使用的是TX2设备,其他设备需查阅转换
int TRIG_GPIO = 394; //Pin 38
int ECHO_GPIO = 393; //Pin 40
using var controller = new GpioController();
using var sensor = new Hcsr04(controller,TRIG_GPIO,ECHO_GPIO);
// 显示准备
using var oled = new SSD1306_128_64(1);
SKPaint paint = new SKPaint() {
Color = new SKColor(255, 255, 255),
StrokeWidth = 1,
TextSize = 13,
Style = SKPaintStyle.Fill,
};
oled.Begin();
oled.Clear();
while (true)
{
if(sensor.TryGetDistance(out _)){
Console.WriteLine($"Distance: {
sensor.Distance}");
// OLED 显示
using(var bitmap = new SKBitmap(128, 64, true)){
SKCanvas canvas = new SKCanvas(bitmap);
paint.TextSize = 13;
canvas.DrawText(DateTime.Now.ToString(), 0, 13, paint);
paint.TextSize = 30;
canvas.DrawText(sensor.Distance.ToString(), 0, 50, paint);
oled.Image(bitmap.Encode(SKEncodedImageFormat.Png, 100).ToArray());
}
oled.Display();
}
Thread.Sleep(1000);
}
最终效果如下:


