卡尔曼滤波与组合导航原理_无人机机载导航系统和传感器基本原理
时间:2022-12-01 08:30:00
本文首发于微信官方账号:无人机系统技术
微信官方账号回复加群进入无人机技术交流群
微信官方账号回复多旋翼,获得国际顶尖团队科研成果
微信官方账号回复控制分配,获取控制分配相关论文
引言
在之前的文章中,我们介绍了很多无人机的控制算法。除了控制算法外,我们还表示,无人机的独立飞行离不开导航算法和制导算法。导航算法的功能是测量和解决无人机的实时运动状态和位置信息,因此各种传感器是实现导航算法的必要前提和输入。
随着科学技术的发展,传感器的使用越来越多,导航系统的种类也越来越多。以航空系统为例,机载导航系统有惯性导航系统,GPS导航系统、北斗导航系统、多普勒导航系统、罗兰C导航系统。更不用说哪个导航系统比其他导航系统好了,只是各有特点和优缺点。
一般来说,我们会同时使用多个导航系统,因为单独使用通常不能满足使用需要,而两个或两个以上的非相似导航系统可以有效地减少测量误差并纠正状态信息。以无人机为例,由于惯性导航和GPS导航在性能上只是互补的,所以我们经常使用惯性导航 GPS为了实现良好的导航性能,设计了机载导航系统。
结合导航设计算法
通常有两种方法可以实现组合导航系统:
回路反馈法
回路反馈法采用经典的回路控制方法来抑制系统误差,使各子系统同时实现性能互补。例如,我们通常使用加速度计和陀螺仪和陀螺仪测量信息设计互补滤波解决态度角。
最优估计法
最佳估计方法是利用卡尔曼滤波器或维纳滤波器误差并消除卡尔曼滤波器或维纳滤波器的方法。
以上两种方法都是相互渗透和有机结合各系统的信息,从而起到互补性能的作用。然而,每个子系统的误差源和测量误差通常是随机的,因此最佳估计方法通常优于电路反馈方法。目前,卡尔曼滤波法是设计组合导航的主流方法。
传感器简介
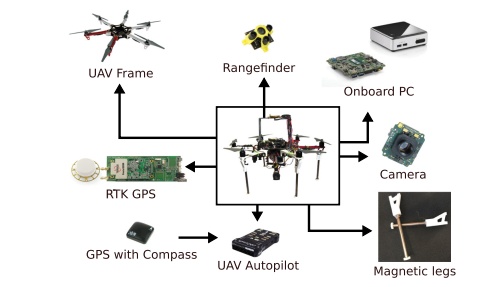
导航系统的基础是传感器,导航算法的设计和输入是传感器测量的数据。因此,在设计导航系统之前,我们应该首先了解无人机上常用的传感器是什么?这些传感器的测量原理是什么?上面提到的无人机常用的导航方法是惯性导航 GPS,因此,无人机上常用的传感器也围绕着它们展开。惯性导航一般包括三轴加速度计、三轴陀螺仪和三轴磁力计GPS除超声波测距传感器、激光测距传感器、空速计、气压计、视觉传感器等外,还构成了机载传感器的主体。
01加速度计
加速度计是一种可以测量无人机的惯性传感器XYZ三轴方向的加速度通常可以与陀螺仪一起测量无人机的三轴姿态。加速度计的缺点是信号受振动影响很大,因此在无人机上使用时需要减震,数据获取后也会过滤。
当无人机静止时,加速度计测量重力加速度,因此在实际使用中,我们都需要去除重力加速度计的值。一般来说,加速度计的测量原理可以被视为弹簧质量模型,但实际上,加速度计的测量是基于压阻效应、压电效应等。这些效应产生的力与电阻、电压和电容值成正比,并通过相应的放大电路和滤波电路输出。
此外,当作用在无人机上的外力远小于重力时,加速度计也可以用来测量姿态角,因为当无人机倾斜时,系统轴下测量的加速度与无人机的姿态角和重力加速值有关,重力加速度值已知,我们可以根据三轴加速度的大小计算无人机的姿态信息(方向除外)。
02陀螺仪
陀螺仪有很多种,包括MEMS陀螺仪、压电陀螺仪、激光陀螺仪、光纤陀螺仪等,不同陀螺仪的价格可差数千倍。小型无人机型无人机MEMS陀螺仪是基于科里奥利力的工作原理。科里奥利力是根据科里奥利力产生的电容变化计算出相应的角速度的。
陀螺仪传感器可以监测三轴的角速度,因此在导航系统中起着非常重要的作用,通常用于解决姿态角度。然而,由于角速度积分的角度随着时间的推移而严重漂移,单个陀螺仪无法计算出准确的角度值,通常需要与加速度一起使用,这是上述性能的补充。
03磁力计
如名称所示,磁力计利用各向异性磁致电阻或霍尔效应测量空间中的磁感应强度。根据洛伦兹力原理,电磁场的强度变化会改变洛伦兹力,从而改变电路中的电容。
磁力计一般不单独使用,通常与加速度计和陀螺仪一起解决姿态角的大小。但是,如果无人机飞行时跨越面积较大,会影响磁力计的正常使用,因为地球上磁场强度不同,所以经常使用双重磁力计GPS的方式来测量航向信息。
此外,磁力计对硬铁、软铁等永磁性物质非常敏感。周围磁场的变化会影响磁力计的使用。可以说,磁力计是无人机传感器中最容易受到干扰的。在调试无人机时,我们经常会遇到航向漂移,这主要与磁力计的异常工作有关。因此,如果有更好的方法来测量航向,去除磁力计是不可能的。
04GPS
GPS这基本上不需要介绍太多,每个人都有手机,旅行时打开导航地图,最重要的信息是定位你GPS,可以简单说一下测量原理,天上GPS卫星将在地面上实时广播它们的位置和时间信息GPS当卫星数量大于或等于4颗时,接收器会收到它们的信息。
为什么是4颗而不是3颗卫星?理论上,地面点的三维坐标(N,E,H)为了确定参数,只需量三颗卫星到地面点的距离即可确定该点的三维坐标。然而,卫地距离是通过信号传输的时差Δt乘以信号传输速度v获得。其中,信号的传输速度v接近光速,值很大。因此,这需要时差Δt如果稍有偏差,测得的卫地距离就会谬以千里。而时间差Δt卫星处测得的信号发射时间与接收机处测得的信号接收时间差。其中,放置在卫星上的原子钟稳定性很高。我们认为星上电子钟的时间和GPS时吻合;接收机处的时钟是石英钟,稳定度一般,我们认为它的时钟时间与GPS有时间同步误差,并以此误差作为待定参数。这样,每个地面点的解算就有四个待定参数,所以至少需要观察从四颗卫星到地面点的卫地距离数据。
当然,GPS只有在开放的空间中才能正常使用。开车的朋友在使用导航时会发现,当他们进入桥梁和隧道时GPS信号会丢失。因此,在使用中GPS尽量在无遮挡区域。无人机现在使用GPS在某些特定环境下使用伪距差分和RTK这些方法可以显著提高无人机的定位精度。
05气压计
气压计的工作原理是利用大气压力换算高度。 气压计也是一种容易受到外界干扰的传感器。当温度发生变化时,气压也会发生变化。此外,无人机旋翼工作产生的气流通常会影响气压计的测量。因此,如果安装了相对高度的传感器,如超声波或激光测距传感器,我们可以使用超声波/激光测距仪 GPS替代气压计的高度方案。
超声波传感器06
超声波是一种超出人耳听觉频率的声波,因其方向性好、穿透性强而被广泛应用于测距和测速。超声波信号由超声波传感器发出,然后通过另一个超声波传感器接收。因此,与物体的距离是声波传播速度和时间间隔乘积的一半。超声传感器的价格一般相对便宜,但由于声传输速度慢,超声传感器的数据更新频率相对较低,测量范围较小,这是超声传感器的缺点。
激光测距传感器
激光测距传感器的原理与超声波传感器基本相同,但发射的信号不同。激光测距传感器发射激光源,其传输速度和时间速度。因此,信号频率远高于超声波传感器,价格远高于超声波传感器。因此,它的缺点也很明显,价格昂贵,测量范围小,可以扫描,当然,可以扫描激光测距仪的价格更高。
08视觉传感器
视觉传感器是指使用摄像头获取图像信息,然后根据图像信息确定目标或无人机相对于目标的位置和速度。视觉传感器更重要的是后处理算法,特别是近年来深度学习算法的发展给视觉传感器在无人机中的应用带来了新的活力。最近,许多关于无人机的研究都是基于视觉的,如基于视觉的目标跟踪、避障、定位等。
09空速计
空速计通常用于固定翼无人机,因为固定翼飞机的各种状态与空速密切相关,如升力和失速。空速计的测量原理是根据伯努利原理确定气流的总压和静压,然后计算空速。
总结
对于常用的机载传感器,我们只需要了解它的基本原理就足够了,因为我们可以根据传感器制造商提供的文档来编写相应的数据,所以我们应该花更多的时间集成传感器数据,如何解决飞机的飞行状态。
过去精彩的文章
我写的所有好文章都在这里。你再也不用翻。mp.weixin.qq.com

