IMU传感器和预积分
时间:2022-12-01 07:30:00
最近看了深蓝学院VIO课程, 学到了很多, 现将课程内容总结如下.
惯性测量单元(英语:Inertial measurement unit,简称IMU)测量物体三轴姿态角(或角速率)和加速度的装置,由陀螺仪和加速度计组成.
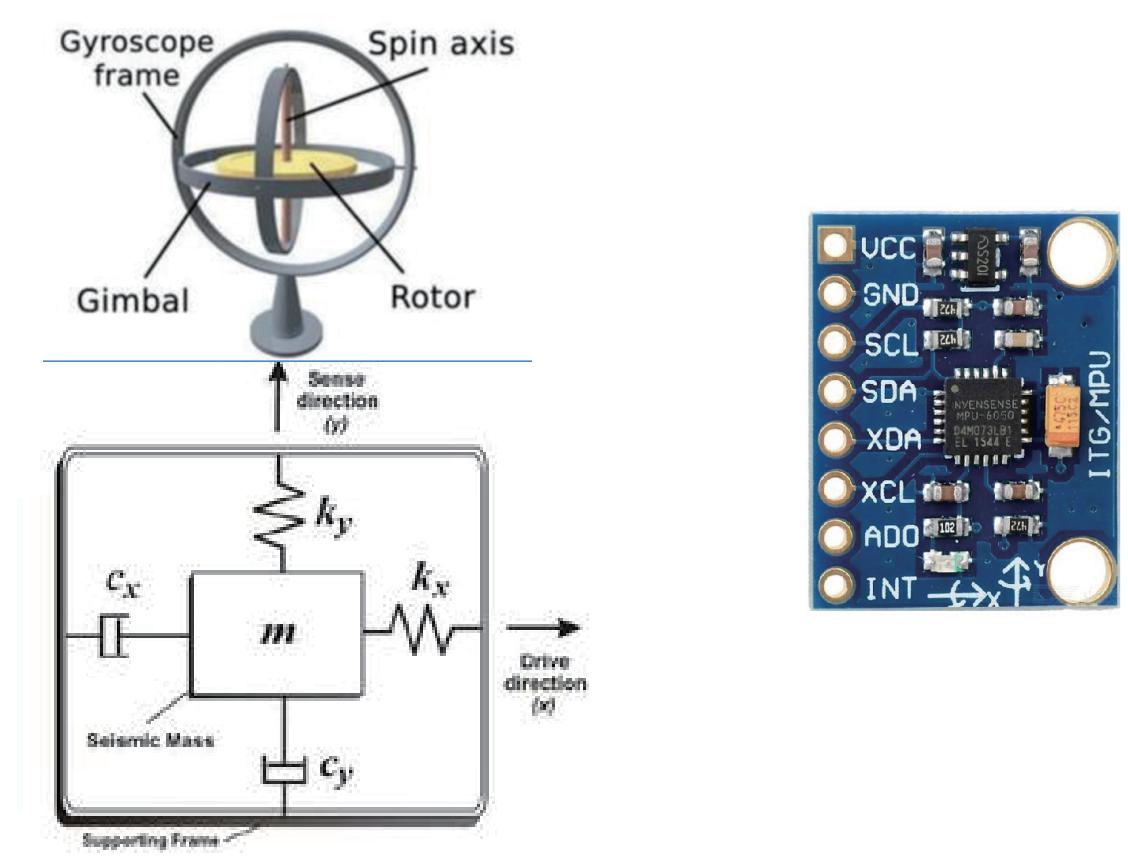
IMU的数学模型
IMU的误差模型
IMU误差包括确定性误差和随机误差,确定性误差包括:Bias Scale,非对齐误差等.
Bias:理论上,当没有外部作用时,IMU传感器的输出应为0。然而,实际数据存在偏置b。加速度计bias对位姿估计的影响:
verr=bat, perr=bat2/2
Scale:可视为实际值与传感器输出值的比值。
非对齐误差:多轴IMU在制作传感器时,由于制造过程的问题,会使xyz轴可能不垂直,如下图所示。
测量值= 尺度对齐矩阵x真实值 , 如下:
IMU随机误差包括高斯白噪声bias随机游走等.
高斯白噪声:IMU数据连续时间的平均值0,方差为 σ,高斯过程在各个时刻相互独立n(t).
Bias随机游走:通常用维纳过程(wiener process)来建模bias随时间不断变化的过程称为随机游走。
数学模型的加速度计
导航系统G是东北天(ENU),g = (0, 0,?9.理论测量值为:
其中amB测量加速度值,aG该惯性系统下的估计值.假考虑高斯白噪声na,bias以及尺度因子Sa,则为:
由于单位矩阵,通常假设尺度因素。
陀螺仪的数学模型
考虑尺度因子、高斯白噪声和bias,陀螺仪误差模型如下:
考虑加速度对陀螺仪的影响,即低端传感器g-灵敏度:
陀螺仪受四种噪声的影响如下图所示:
运动模型
运动模型的连续积分
忽略scale只考虑白噪声和bias随机游走:
上标g表示gyro,a表示acc,w代表世界坐标系world,b表示imu机体坐标系body。IMU的真实值为 ω, a,测量值为 ω?, a?。P(ose),V(elocity),Q(uaternion)时间导数可以写成:
根据上述导数关系,可以从第一个开始i时刻的PVQ,通过对IMU积分测量值,得到第j时刻的PVQ:
j时间的位置等于i时间的位置,加上速度引起的位置变化,加上加速度引起的位置变化.
j时刻的速度等于i时刻的速度,加上加速度引起的速度变化.
Q变化量如上。
欧拉法运动模型的离散积分
使用欧拉法,即两个相邻的时刻k到k 1位置为第k时刻测量值a,ω 来计算。
其中,
运动模型的离散积分-中值法
使用mid-point方法,即两个相邻时刻k到k 1位置是两个时刻的测量值a,ω 计算平均值。
其中:
VIO
机器人定位有很多方案,其中IMU比较相机定位的优缺点:
可以看到,视觉和IMU定位方案具有一定的互补性:IMU适用于短时间、快速运动的计算;视觉适用于长时间、慢速运动的计算。视觉定位信息可以用来估计IMU零偏,减少IMU零偏差引起的发散和积累误差;相反,IMU能为视觉提供快速运动的定位。
IMU与视觉融合定位时,有两种方案:
松耦合:将IMU定位与视觉/视觉/定位与视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视觉/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视/视GNSS位置直接融合,融合过程不影响两者本身,作为后处理输出。典型的方案是卡尔曼滤波器。
紧耦合:融合过程本身会影响视觉和IMU参数(如IMU的零偏和视觉的尺度)。典型方案为MSCKF和非线性优化。
IMU预积分
IMU测量频率高,可达120Hz,相机的帧率一般只有30FPS,若考虑关键帧的化,频率更低.如下图所示:
同时,紧耦合VIO中对相机位置和IMU联合优化位置,导致与相机帧同时的时刻IMU测量值将不断优化.每次优化更新后,都需要重新进行积分,计算量大。
从第i时刻的PVQ对IMU的测量值进行积分得到第j时刻的PVQ:
以下简单公式将t时刻的积分模型转换为预积分模型:
则PVQ与第一个相比,积分公式中的积分项变成了i与世界坐标系相比,始终的姿态不是:
只跟随预积分量IMU测量值与一段时间内的测量值有关IMU直接积分数据得到预积分量,记下以下项目:
重新整理下PVQ有:
预积分误差:一段时间内IMU构建的预积分量作为测量值,约束两时之间的状态量:
上述误差中的位移、速度和偏置直接减少。第二个是四元数的旋转误差,其中[·]xyz表示只取四元数的虚拟 (x, y, z) 组成的三维向量。
预积分的离散形式: 这里使用 mid-point 方法,即两个相邻时刻 k 到 k+1 的位姿是用两个时刻的测量值 a, ω 的平均值来计算:
预积分量的方差
假设已知了相邻时刻误差的线性传递方程:
状态量误差为 ηik = [δθik, δvik, δpik],测量噪声为nk = [ngk, nak]。误差的传递由两部分组成:当前时刻的误差传递给下一时刻,当前时刻测量噪声传递给下一时刻。
协方差矩阵可以通过递推计算得到:
其中,Σn 是测量噪声的协方差矩阵,方差从 i 时刻开始进行递推,Σii = 0。
状态误差线性递推公式的推导
通常对于状态量之间的递推关系是非线性的方程如 xk = f(xk-1, uk-1),其中状态量为 x,u 为系统的输入量。我们可以用两种方法来推导状态误差传递的线性递推关系:
• 一种是基于一阶泰勒展开的误差递推方程。
• 一种是基于误差随时间变化的递推方程。
基于一阶泰勒展开的误差递推方程
令状态量为 x = xˆ + δx,其中,真值为 xˆ,误差为 δx。另外,输入量 u 的噪声为 n。对非线性状态方程进行一阶泰勒展开有:
其中F 是状态量 xk 对状态量 xk-1 的雅克比矩阵,G 是状态量 xk 对输入量 uk-1 的雅克比矩阵。 则非线性系统 xk = f(xk-1, uk-1) 的状态误差的线性递推关系如下:
用前面一阶泰勒展开的推导方式,我们希望能推导出如下的形式:
F, G 为两个时刻间的协方差传递矩阵, 这里我们直接给出 F, G 的最终形式:
其中:


