【翻译】一种减小运动伪影的新方法基于AS-LMS自适应滤波器的PPG信号
时间:2023-03-04 01:30:00
基于减少运动伪影的新方法AS-LMS自适应滤波器PPG信号
A Novel Approach for Motion Artifact Reduction in PPG Signals Based on AS-LMS Adaptive Filter
摘要
脉冲血氧计的性能受光体积描记(PPG)运动伪影在信号中(MA)高度影响。本文提出了基于自适应步长最小平方的简单有效的方法(AS-LMS)减少自适应滤波器的方法PPG信号误差。本文提出的方法是减少我们之前关于有效使用自适应滤波器的问题PPG信号中MA扩展工作。该方法的新颖之处在于,合成噪声参考信号用于自适应滤波过程(表示MA噪声)是由MA损坏的PPG内部产生的信号,而不是使用任何额外的硬件(如加速度计或源探测器对)来获取噪声参考信号。因此,应用产生的噪声参考信号AS-LMS在自适应滤波器中去除伪影。实验结果证明了该方案的有效性。通过收敛性和相关性分析,明确证明了该方法的优点,使其最适合单对源和探测器PPG传感器头脉搏血氧仪不需要任何额外的硬件来捕获噪声参考信号。除动脉氧饱和度外(SpO2)除了估计,减少伪影也有助于减少伪影PPG对波形轮廓进行分析,并对常规参数进行评估,以评估动脉刚度。
简介
但由于受试者在获取数据时自愿或非自愿运动,PPG通常是运动伪影(MA)破坏。由于在PPG中搏动成分很小(占信号总振幅0.1%),即使是患者最轻微的运动也会导致MA,导致对SpO估计不准确。事实上,自脉搏血氧仪发明以来,通过减少PPG信号中的MA可靠估计SpO一直是一个具有挑战性的问题。适当处理PPG可以降低信号MA对SpO2的影响。通过显示几个SpO读数的平均值可以在一定程度上降低。人们做了很多努力来减少MAs对受损PPG信号的影响。移动平均法通常用于减少MA[2],[5],它只对有限范围的伪影有效。当MA和PPG当信号频谱明显重叠时,会产生带内噪声。自适应滤波器能有效处理带内噪声[6][9],需要与伪影强相关但与信号无关或与信号强相关但与伪影无关的参考信号。在大多数情况下,适当的参考信号(代表MA)它是通过使用额外的硬件获得的。例如,从附加传感器[6]、[7]或使用附加反射光电传感器[8]获得参考信号。使用从PPG也报道了信号无伪部分[9]估计的合成参考信号,以减少MA。在Masimo SET在[10]中,静脉血容量的变化被认为是运动过程中噪声的重要因素,因此,从伪物中诱导PPG无需额外硬件,信号本身提取静脉噪声参考信号。然后消除自适应噪声PPG去除添加到信号中的伪影。采用多速滤波器组和匹配滤波器[11]的信号处理技术,其性能优于移动平均方法。生物系统的动态特性导致大多数生物信号不稳定,其性质会随着时间的推移而发生实质性的变化。基于PPG这种信号的不稳定特性将小波转换为[12]和平滑伪Wigner Ville应用于分布[13]等时频法PPG与传统方法相比,信号显著改善。基于物理伪影模型反演的非线性光学接收器提出了一种基于模型的伪影减少方法[14],并使用额外的源探测器实现[15],以减少三波长探头MA。通过利用PPG和MA信号之间的独立性也证明了MA使用独立分量分析(ICA)来降低。虽然对PPG三阶信号的时间导数ICA可以得到更好的伪影抑制[16],但与所谓的块交错低通滤波预处理相结合ICA比单独进行ICA[17]效果更好。对小波变换和自适应滤波技术恢复伪影减少的比较研究PPG用于估计心率[18]和[19](HR)以及脉搏传递时间的有效性,发现两种方法都是正确的PPG信号引入了相移。基于奇异值分解(SVD)傅里叶级数分析[21]和高级统计[22]MA新的减少处理方法提取了清洁无伪PPG信号保留了所需的所有基本形态特征。
其他降低PPG信号MA方法包括自适应滤波,改进机械设计和传感器配置[28]。其中,基于MEMS基于加速度计的运动可穿戴生物传感器[29]和[30]激发了研究人员对传感器设计改进方向的思考。然而,围绕自适应滤波器开发的MA减少算法要求参考信号要么与伪影强相关,要么与信号强相关,但与伪影无关。因此,这些方法总是依赖于额外的硬件,如加速度计[29]、[30]或源探测器来获取噪声参考信号,从而产生三波长探头,而不是商业脉冲血氧计(CPO)两波长探头。使用特殊硬件获取噪声参考,如加速度计,实际上可以有效地减少PPG噪号[30]噪声。然而,本文的工作主要是实现一种自适应滤波算法来MA,利用现有的CPO在没有任何额外硬件的情况下,双波长探头。
基于我们之前对自适应滤波器的有效使用PPG[23][25]MA扩展工作。该技术的新颖之处在于自适应滤波过程的合成噪声参考信号(表示MA噪声)是由MA损坏的PPG内部产生的信号,而不是使用任何额外的硬件,如加速度计或额外的源探测器来获取噪声参考信号。在[25]中,合成噪声参考是使用众所周知的快速傅里叶变换(FFT)技术生成的。本文提出了另外两种方法,即SVD法和ICA法来生成MA噪声参考信号。随后,利用随机参数计算和测试上述方法产生的噪声基准MA噪声分量的相关性。根据随机偏差选择最合适的噪声参考信号,并将其应用于提出的自适应步长最小平方(AS-LMS)在自适应滤波器中。通过比较,基于时间变长LMS (TVS-LMS)和恒定步长LMS (CS-LMS)基于时域的自适应算法和(TD)和频域(FD)分析的PPG信号SpO研究了该方案的性能。
减少运动伪影
由MA ( 0.1 H z 0.1 Hz 0.1Hz或更多)噪声频谱有机会和有用PPG信号( 0.5 ~ 4.0 H z 0.5\sim 4.0 Hz 0.5~4.0Hz)重叠并导致带内噪声。自适应滤波器通过一些特定的自适应算法来消除带内噪声。除了适当的自适应算法外,参考信号在自适应滤波器中也起着至关重要的作用。事实上,自适应滤波器需要一个参考信号 [ N R ( n ) ] [N_{R}(n)] [NR(n)],该参考信号要么与伪影强相关,但与信号不相关,要么与信号强相关,但与伪影不相关。所提出的MA降低方案显示了有效的合成噪声参考信号产生部分和ASLMS自适应滤波部分,如图1所示的方框图所示。
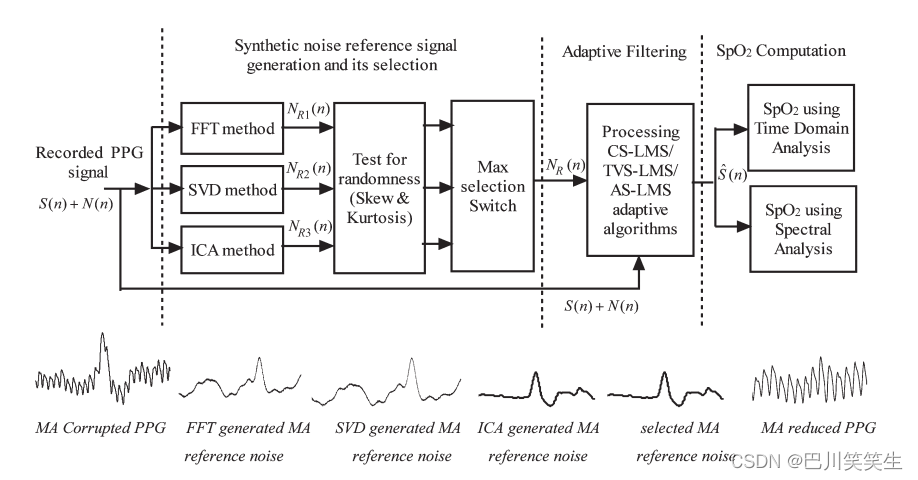
提出的MA减少方案的框图。噪声基准生成块取 M A [ N ( n ) ] MA[N(n)] MA[N(n)]损坏的PPG信号 [ ( S n ) + N ( N ) ] [(S_{n}) + N(N)] [(Sn)+N(N)],给出代表MA的最佳可能噪声基准 [ N R ( N ) ] [N_{R}(N)] [NR(N)]。该自适应算法通过 N R ( n ) N_{R}(n) NR(n)和 ( S n ) + N ( n ) (Sn) + N(n) (Sn)+N(n)运算从MA中恢复PPG。最后,采用TD和FD分析方法计算了SpO2。
A.合成噪声参考信号 [ N R ( n ) ] [N_{R}(n)] [NR(n)]产生
这构成了该方法的新部分。在这里,内部生成了一个合成 N R ( n ) N_{R}(n) NR(n)用于所提出的自适应滤波技术,而不需要任何额外的硬件,如加速度计或额外的源探测器对来获取 N R ( n ) N_{R}(n) NR(n),就像通常所做的。
N R ( n ) N_{R}(n) NR(n)由受损的PPG信号分别通过FFT、ICA和SVD三种不同的方法生成,如下所示。
FFT方法
下面介绍使用FFT方法[25]产生噪声参考信号的步骤。
-
计算了由各种频率成分组成的MA损坏PPG信号的频谱,即搏动PPG心脏部分( 0.5 − 4 H z 0.5-4 Hz 0.5−4Hz)、呼吸活动( 0.2 − 0.35 H z 0.2-0.35 Hz 0.2−0.35Hz)和MA噪声成分( 0.1 H z 0.1 Hz 0.1Hz或更多)信息。
-
通过将MA损坏的PPG信号频谱中心脏和呼吸频率分量的系数设为零,得到了与噪声对应的修正频谱。
-
通过对修正后的噪声频谱进行傅里叶反变换,产生了一个合成的噪声参考信号,即MA。
奇异值分解法
奇异值分解法是线性代数的一个重要工具。 一旦分解,给定数据矩阵的奇异值包含了数据[20]中关于噪声水平的信息。使用SVD方法生成噪声参考信号的步骤如下所述。
- 将奇异值分解(SVD)应用于记录信号的对齐PPG数据矩阵,计算前两个奇异值的比值,称为奇异值比(SVR)
- 在每种情况下,信号的长度被认为是心率期望范围的一个周期。然后根据周期绘制SVR值,得到称为信号SVR频谱的图
- 从SVR频谱出发,选取SVR最大的周期的特定值作为PPG信号的周期。
- 现在,数据矩阵根据SVR频谱计算的周期性进行重新排列。
- 对重新组合后的PPG数据矩阵再次进行奇异值分解(SVD),将代表脉搏分量和呼吸分量的前两个奇异值分别置零。
- 噪声参考信号是由重新组合的PPG数据矩阵保留的奇异值产生的。
ICA方法
ICA是一种非常强大的信号处理技术[17],它将一组随机变量表示为统计上独立分量变量的线性组合。接下来描述使用ICA方法生成噪声参考信号所涉及的步骤。
- 预处理包括截止频率为 10 H z 10 Hz 10Hz的低通滤波,以消除记录PPG信号中的高频噪声成分。
- 然后对预处理后的红色和红外PPG信号进行下采样,直到它消除了PPG信号的搏动成分,同时保持呼吸和MA成分的完整。
- 采用独立分量分析(ICA)算法对线性混合呼吸信号和混合呼吸信号进行分离,其中混合呼吸信号可作为生成的噪声参考信号。
MA主要是由于受检者[31]的随意或不随意振动,因此动脉血液的心脏同步搏动成分会被伪影淹没。因此,在大多数情况下,PPG的许多有用的搏动成分被动脉血液的随机波动破坏,导致PPG信号的形态改变。因此,歪斜和峰度等随机性度量可以作为MA检测的重要特征。
根据定义,偏度是对概率分布对称性(或不对称性)的一种衡量,而峰度则表示相对于正态分布,一个分布有一个较重的尾部和峰值,或一个较轻的尾部和平坦度。它从平均值中捕捉数据的随机变化。随机变量x的偏度和峰度由
偏 度 : C 3 x ( 0 , 0 ) = μ 3 σ 3 / 2 ( 1 ) 峰 度 : C 4 x ( 0 , 0 ) = μ 4 σ 4 − 3 ( 2 ) 偏度: C_{3x}(0,0)=\frac{\mu_{3}}{\sigma^{3}/2}\quad (1)\\ 峰度: C_{4x}(0,0)=\frac{\mu_{4}}{\sigma^{4}}-3\quad (2) 偏度:C3x(0,0)=σ3/2μ3(1)峰度:C4x(0,0)=σ4μ4−3(2)
其中 σ \sigma σ为标准差, μ 3 \mu_{3} μ3和 μ 4 \mu_{4} μ4分别为第三和第四中心矩。根据上述方法产生的信号的计算出的歪斜和峰度,选择合适的MA噪声参考进行自适应滤波。虽然用于选择生成的最佳合成噪声参考信号的准则(分别使用FFT、SVD和ICA方法)是产生斜度和峰度都最高的噪声参考信号的方法,但在第四节中也证明了,仅高峰度值就可以作为选择合成噪声参考信号的可靠措施。
B.应用AS-LMS技术进行MA还原
自适应滤波器的基本形式如图2(a)所示,其中方案寻找参考信号,这需要额外的硬件设施。本文提出的自适应滤波方案的结构如图2(b)所示,该方案使用现有的CPO双波长探头,而不寻找任何额外的硬件。LMS算法是目前最流行的一种算法[26],我们之前的工作[23][25]利用了它在CS-LMS和tv -LMS算法中对MA约简的作用。在本文中,我们提出了一种从ma损坏的信号中恢复无伪迹PPG的AS-LMS算法。下面详细介绍每种算法的滤波和权值更新方程。
图2所示。(a)基本自适应滤波器框图。(b)提出的方案的MA降低配置,其中噪声参考信号 N R ( n ) N_{R}(n) NR(n)由MA损坏的PPG [ S ( n ) + N ( n ) ] [S(n) + N(n)] [S(n)+N(n)]产生,并应用于基于AS-LMS算法的自适应滤波器,该算法依次估计噪声 N ^ ( n ) \hat{N}(n) N^(n)。
c .噪声模型
在学术界,基于自适应滤波的有效算法已经被开发出来,以解决MA降低问题。从研究人员的观点可以清楚地看出,自适应滤波器可以有效地用于任何使用不同信号失真模型[28][30]设计的PPG系统。自适应滤波器可以有效地降低随机或周期性的多值。在这种自适应滤波的情况下,假设加性失真模型[29],[30],其中运动损坏的PPG信号被认为是干净的(原始)PPG和MA的混合。此外,该伪迹被假定为与有用的PPG信号高度不相关。
CS-LMS算法
CS-LMS算法利用梯度的瞬时估计来搜索误差面的最小值,可以用以下三个方程来描述:
y ( n ) = w T ( n ) u ( n ) : 滤 波 器 输 出 ( 3 ) e ( n ) = d ( n ) − y ( n ) : 错 误 信 息 ( 4 ) w ( n + 1 ) = w ( n ) + μ e ( n ) u ( n ) : 权 重 向 量 更 新 ( 5 ) y(n) =w^{T}(n)u(n) : 滤波器输出\quad(3)\\ e(n) =d(n) − y(n) : 错误信息\quad(4)\\ w(n + 1) =w(n) + μe(n)u(n) : 权重向量更新\quad(5) y(n)=wT(n)u(n):滤波器输出(3)e(n)=d(n)−y(n):错误信息(4)w(n+1)=w(n)+μe(n)u(n):权重向量更新(5)
式中, u ( n ) u(n) u(n)为滤波器输入, e ( n ) e(n) e(n)为自适应滤波器产生的误差, d ( n ) d(n) d(n)为滤波器的期望输出, μ μ μ为权值向量更新所用的步长。
TVS-LMS算法
在简单CS- LMS算法中,参数μ的选择对算法的稳定性和收敛速度至关重要。为了改善基于LMS的自适应滤波器的特性,可以采用TV-LMS算法。完整的算法可以用以下公式来描述:
y ( n ) = w T ( n ) u ( n ) : 滤 波 器 输 出 ( 6 ) e ( n ) = d ( n ) − y ( n ) : 错 误 信 息 ( 7 ) w ( n + 1 ) = w ( n ) + μ n e ( n ) u ( n ) : 权 重 向 量 更 新 ( 8 ) μ n = α n × μ 0 : T V S ( 9 ) α n = C 1 / ( 1 + a n b ) : 衰 减 系 数 ( 10 ) y(n) = w^{T} (n)u(n) : 滤波器输出\quad(6)\\ e(n) = d(n) − y(n) : 错误信息\quad(7)\\ w(n + 1) = w(n) + μ_{n}e(n)u(n) : 权重向量更新\quad(8)\\ μn = α_{n} × μ_{0} : TVS\quad(9)\\ αn = C^{1/(1+a^{n}b)} : 衰减系数\quad(10) y(n)=wT(n)u(n):滤波器输出(6)e(n)=d(n)−y(n):错误信息(7)w(n+1)=w(n)+μne(n)u(n):权重向量更新(8)μn=αn×μ0:TVS(9)αn=C1/(1+anb):衰减系数(10)
其中 C , a , b C,a,b C,a,b为正常数,决定 α n α_{n} αn的大小和衰减速率。因此, C C C必须是大于 1 1 1的正数,当 C = 1 C = 1 C=1时,
α n = 1 α_{n} = 1 αn=1,新算法与传统的LMS算法相同, μ 0 μ_{0} μ0为初始步长。
AS-LMS算法
在非平稳环境中,最小代价函数( J m i n J_{min} J元器件数据手册、IC替代型号,打造电子元器件IC百科大全!




