陀螺仪和加速度传感器
时间:2023-02-16 15:00:01
今天找pid我突然找到了一个信息,然后找到了一个平衡车教程,所以我把它记录下来,以便将来阅读。下面有一个链接,所以你可以去看看这个网站。
1. 加速传感器
加速度传感器,有些人也叫它加速度计,你只需要记住它实际上是一件事,两个名字。
顾名思义,加速度传感器用于测量地球引力或物体运动产生的加速度。
为了便于理解,我将加速度分为两种:地球引力产生的重力加速度,只要地球仍然存在,重力就不会消失;根据牛二定理,只要有外力,就会产生加速度。加速度传感器测量加速度的总和。物体静态加速度计测量重力加速度。
2.陀螺仪
陀螺仪,是的,它只叫陀螺仪,没有别的名字。
陀螺仪,顾名思义,你猜不出它是干什么的也很正常。但是,请记住,陀螺仪可以用来测量物体的旋转角速度。
小时候玩四驱的时候,我们常说这台电机每秒1万转,单位每秒转。你怎么知道它每秒1万转你相信它是这样写的吗?如果我们有陀螺仪,把陀螺仪挂在电机轴上,那么陀螺仪测量旋转角速度,除了360度(旋转)。事实上,我们不会这样测量速度。 -,这里仅举个例子让你明白陀螺仪是干啥的。
陀螺仪利用旋转坐标系中的物体受到科里奥利力的影响。在陀螺仪中,振动单元由压电陶瓷制成。旋转(陀螺仪)时,振动频率会改变,反映物体旋转的角速。
要获得角度,需要积分陀螺仪的角速Angle 。Angle正负,正值表示正向旋转,负值表示负向旋转。如何定义正负方向取决于你的应用。
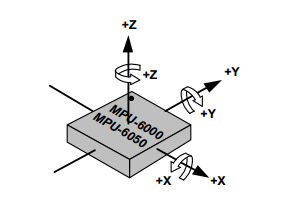
图5 MPU-6050方向正负示意图
由于从陀螺仪角速度获得角度信息,需要经过积分运算。如果角速度信号存在微小 积分运算后,偏差和漂移变化形成积累误差。随着时间的推移,这种误差会逐渐延长 最终导致电路饱和,无法形成正确的角度信。如图6所示。
为什么要使用加速度计和陀螺仪?
似乎只有加速度传感器才能获得模型的倾角,然后微分角度值就可以获得倾角速度。然而,在实际车身运行过程中,车身本身的摆动产生的加速度会产生很大的干扰信号,这使得输出信号无法准确反映车身的倾角,如图7所示。
图7 车身运动引起加速度信号波动
由于陀螺仪输出车身的角速,不受车身运动的影响,信号中的噪音很小。车身的角度是通过对角速度积分获得的,可以进一步平滑信号,从而使角度信号更加稳定。因此,陀螺仪获得的信号可用于车模控制所需的角度和角速。
从陀螺仪的角度获取角度信息需要积分操作。如果角速度信号有轻微的偏差和漂移,则微的偏差和漂移,则累误差。随着时间的推移,误差会逐渐增加,最终导致电路饱和,无法形成正确的角度信号,如图8所示。
图8 陀螺仪积分误差
陀螺仪的累积误差如何消除?
一个简单的方法是通过加速度传感器获得的角度信息进行校正。通过比较陀螺仪积分的角度和重力加速度,改变陀螺仪的输出,逐渐跟踪加速度传感器的角度。
总之,陀螺仪噪音小,角速度数据准确,角度通过积分获得,但长期积分会产生积累误差,需要加速度传感器来纠正误差,获得正确的姿态数据。
转自:
https://miaowlabs.com/book/MWbalanced/why-accel-gyro.html


