【PMSM】一. 电流环、速度环设计(上)
时间:2023-01-15 12:00:00
本文采用经典串级 PI 控制器控制永磁无刷电机的电流环和速度环,讨论了系统的建模和控制器的参数。
一. 电流环设计
电机电流环传输函数如下:
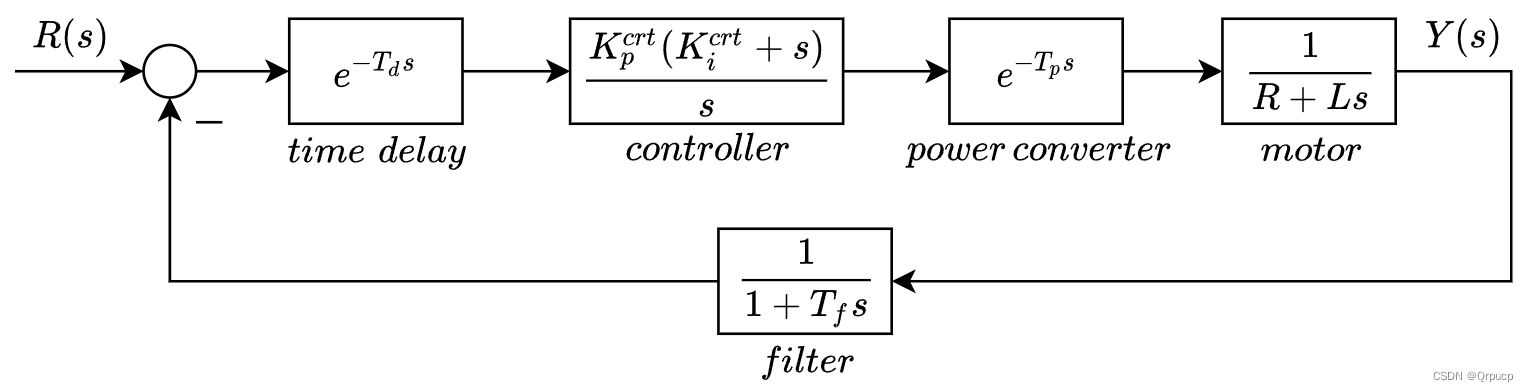
电机的传输函数为 1 / ( R L s ) 1/(R Ls) 1/(R Ls), R R R 和 L L L 分别为电机的相电阻和相电感。使用一阶低通滤波器对反馈电流进行滤波,其传递函数为 1 / ( 1 T f s ) 1/(1 T_fs) 1/(1 Tfs),其中 T f T_f Tf 是滤波器的时间常数。 PI 控制器 PI 控制器的传输函数为 K p ( K i s ) / s K_p(K_i s)/s Kp/span>(Ki+s)/s,并联型 PI 控制器的传递函数为 ( K p s + K i ) / s (K_ps+K_i)/s (Kps+Ki)/s,本文为方便进行零点配置,推导时使用的是串联型的 PI 控制器,但在最后也会给出并联型 PI 控制器参数的推导公式。逆变器的传递函数为一个延时环节,对于7段式 SVPWM 调制来说,其延时 T p T_p Tp 等于 T d / 2 T_d/2 Td/2(在有些设计中按最大延时考虑,即 T d T_d Td ), T d T_d Td 为电流环的一个计算周期。同时,考虑到控制器是离散的,整个回路中还有 T d T_d Td 的延时。
在框图中,我们没有考虑反电动势的影响,因为对电流环来说,反电动势是一个慢变的扰动,只要电流环的带宽足够大,就可以忽略反电动势项的影响。忽略反电动势影响的条件如下,其中, w b w_b wb 为电流环的闭环带宽, T e T_e Te 为电机的电磁时间常数, T m T_m Tm 为电机的机电时间常数,详细推导见第三节。
w b ≥ 3 1 T e T m w_b \ge 3\sqrt{\frac{1}{T_eT_m}} wb≥3TeTm1
若电流环的带宽不满足近似条件,或对电流环实际带宽有严格的要求,则可以引入前馈控制来补偿反电动势带来的扰动,我们在计算控制器参数的时候同样可以忽略反电动势。
反馈通路上的一阶低通滤波器在抑制噪声的同时,也会带来延时,为了平衡这个延时作用,在输入信号通道上加入一个时间常数相同的惯性环节,称作配合滤波环节,从而使滤波器可以从反馈通路移动到前向通道中,带来设计上的方便,如下图所示:
延时环节 e − T d s e^{-T_ds} e−Tds 和 e − T p s e^{-T_ps} e−Tps 不利于设计与分析,故使用泰勒展开将其近似为一个一阶惯性环节:
e − T d s = 1 e T d s ≈ 1 1 + T d s e^{-T_ds}=\frac{1}{e^{T_ds}}\approx \frac{1}{1+T_ds} e−Tds=eTds1≈1+Tds1
方框图可以简化如下:
可以看出,传递函数中有多个高频段的小惯性环节,系统的阶次很高,故首先要进行降阶处理。完整的证明见第三节,下面只给出结论。
G ( s ) = 1 ( 1 + T d s ) ( 1 + T p s ) ( 1 + T f s ) G\left( s \right) =\frac{1}{\left( 1+T_ds \right) \left( 1+T_ps \right) \left( 1+T_fs \right)} G(s)=(1+Tds)(1+Tps)(1+Tfs)1
w b w_b wb 为电流环的带宽,当其满足如下条件时:
w b ≤ 1 3 1 T d T f + T d T p + T f T p w_b \le \frac{1}{3}\sqrt{\frac{1}{T_dT_f+T_dT_p+T_fT_p}} wb≤31TdTf+TdTp+TfTp1
G ( s ) G(s) G(s) 可以近似为:
G ( s ) ≈ 1 1 + ( T d + T p + T f ) s = 1 1 + T s G\left( s \right) \approx \frac{1}{1+\left( T_d+T_p+T_f \right) s} = \frac{1}{1+Ts} G(s)≈1+(Td+Tp+Tf)s1=1+Ts1
故方框图可以简化为:
其中,总延时 T = T d + T p + T f = T f + 3 / 2 ∗ T d T=T_d+T_p+T_f = T_f+3/2*T_d T=Td+Tp+Tf=Tf+3/2∗Td,系统的开环传递函数如下:
G o p e n c r t ( s ) = Y ( s ) R ( s ) = K p c r t ( K i c r t + s ) s ∗ 1 1 + T s ∗ 1 R + L s G_{open}^{crt}\left( s \right) =\frac{Y\left( s \right)}{R\left( s \right)}=\frac{K_{p}^{crt}(K_{i}^{crt}+s)}{s}*\frac{1}{1+Ts}*\frac{1}{R+Ls} Gopencrt(s)=R(s)Y(s)=sKpcrt(Kicrt+s)∗1+Ts1∗R+Ls1


