Light Detection and Ranging (LiDAR)光探测和测距 (LiDAR)
时间:2022-11-02 14:00:00
Light Detection and Ranging (LiDAR)光探测与测距 (LiDAR)
它是什么?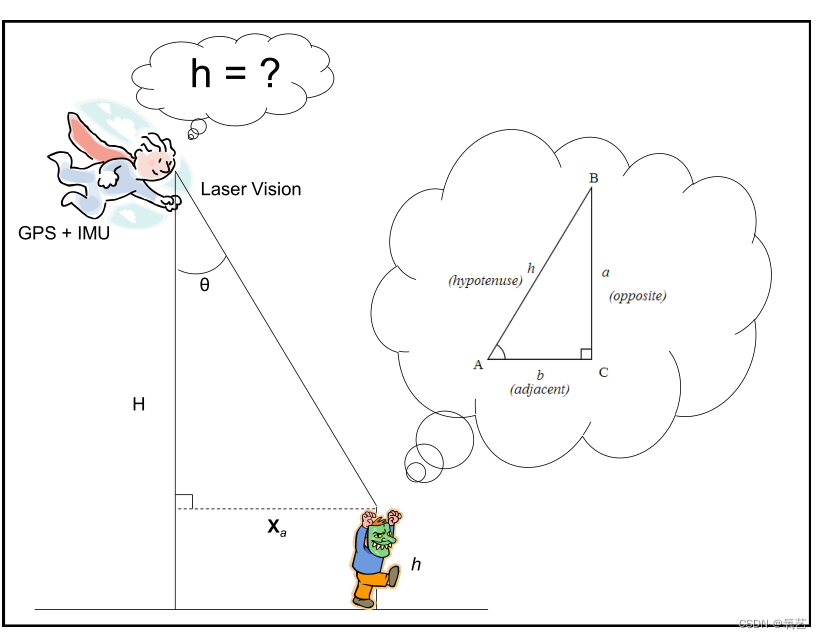
航空传感器的类型?
分为主动和被动传感器
主动传感器用于绘制地形图
雷达
微波通过脉冲发射
确定与物体的距离及其角度位置
(从侧面看)
LiDAR
光学激光以脉冲的形式传输
确定与物体的距离
LiDAR的历史
激光测距发展于20世纪60年代
1970年代开始LiDAR地形测绘
最初的系统是 剖面装置单光束
由于缺乏准确的地理参考,早期地形测绘受到限制
用于测深的早期系统
全球定位系统和惯性导航(测量)系统的发展提高了精度
LiDAR平台
空中
用于高度详细的局部高程数据
卫星
覆盖面积大,细节少
激光雷达操作理论
发出光脉冲,记录准确的时间。
检测脉冲反射,记录准确时间。
使用恒定光速,延迟可转换为 "斜距 "距离。
如果你知道传感器的位置和方向,你可以计算反射面XYZ坐标。
LiDAR系统的组成部分
激光扫描仪
高精度时钟
GPS
IMU-惯性导航测量单元
数据存储和管理系统
GPS地面站
LiDAR系统的组成部分
频率:
每秒50,000(50k)至200,000(200k)个脉冲(Hz)
波长
红外线(1500-2000纳米)用于气象学-多普勒激光雷达
陆地测绘采用近红外线(1040-1060纳米)
水深测量采用蓝绿色(500-600纳米)
气象学中使用紫外线(250纳米)
对眼睛安全;低瓦特(<1瓦)。
电磁波谱
如何工作激光?
高压电使石英闪光灯管发出强光,将圆柱形红宝石晶体中的一些原子激发到更高的能量水平。
在一个特定的能量水平上,一些原子发射子,称为光粒子。起初,光子向各个方向发射。一个原子的光子刺激其他原子的光子发射,光强迅速扩大。
镜子两端来回反射光子,继续刺激发射和放大。
光子通过一端的一部分银镜离开。这是激光。发出的光波相互同行,几乎平行,可以在不扩散的情况下传播很远的距离。
LiDAR系统的组成部分
扫描仪
镜子旋转或扫描,将激光脉冲投射到表面
扫描角度可达75度;扫描仪测量每个脉冲发射角度
从表面接收反射脉冲(回波)。
LiDAR系统的组成部分
全球定位系统(GPS)
记录扫描仪x、y、z位置–调查飞行区地面基站
惯性测量单元(IMU)
与地面角度方向相比(俯仰、滚动、偏航)
LiDAR系统的组成部分
时钟
记录激光脉冲离开和返回扫描仪的时间
机载LiDAR的原理–飞行计划
不能穿透云层
通常在晚上飞行
在陡峭的地形上重叠30-50%
在城市地区以不同角度多次通过(以避免LiDAR “阴影”)
飞行高度一般为200-300米(城市地区较高)
扫描仪发射的每个激光脉冲将收到多个 “回波”
现代系统可以重新编码每个脉冲多达5个回报
LiDAR的原理 – 回波
传感器与表面物体之间的距离是通过比较脉冲离开扫描仪的时间和每次返回的时间来计算的。
LiDAR的原理 – 回波
每个回波的x/y/z坐标是使用扫描仪的位置和方向(来自GPS和IMU)、计算出扫描镜的角度和物体的范围距离
回波的集合称为点云
激光脉冲移动时间
例如:
飞行高度为300米,物体在传感器正下方10米。激光脉冲的运动时间是多少?.93467 X 10-6秒(或1,935纳秒)。
激光雷达文件中数据的空间范围图
单个激光雷达文件中的飞行数据对应于阴影和数字条纹,奇数和偶数条纹的飞行方向相反。
最大无歧义范围(脉冲激光)
激光能量
脉冲率(非重叠脉冲)
SPiA与MPiA(空中单脉冲和空中多脉冲)
MPiA在收到前脉冲反射之前,允许发射下激光脉冲的技术。
LiDAR分辨率/DEM分辨率
激光视场(FOV)(或足迹)
测距距离和测距分辨率
点密度/点间距
LiDAR- FOV(或足迹)大还是小?
FOV与光束发散有关(0.1到1毫弧度)
小FOV用于详细的局部测绘
大FOV更完整的地面采样和与多个垂直结构的互动
大FOV通常会导致较低的信噪比
脉冲激光器 测距距离(R)和测距分辨率(ΔR)
其中:c:光速(~299,792,458米/秒
t:发送/接收脉冲的时间间隔(ns)
Δt:时间测量的分辨率(ns)。
LiDAR的原理–“分辨率”
各单位面积的脉冲数
目前的系统可达20 脉冲/平方米
分辨率取决于飞机速度和飞行高度(FOV)、脉冲发射率决定
点间距不均匀
LiDAR的原则–“分辨率”
分辨率高,分辨率窄FOV穿透茂密的植被
高分辨率可以更好地区分表面和表面的特征,但成本是数据集大,处理时间慢
激光雷达密度和DEM分辨率–每DEM平均1个激光雷达脉冲像素
点密度(如每平方米8个脉冲)
点间距(如50cm)
PS = SQRT(1/PD)
例如,8个脉冲/米2 = 0.35米
LiDAR的原理
精度
垂直精度一般为15-20cm(约6英寸)
水平精度为1/3至1m
通过低空慢速飞行和狭窄飞行FOV提高精度
LiDAR的原理 强度
回波的强度随反射回波表面物体的组成而变化
反射百分比称为LiDAR强度
可用于识别土地覆盖类型
强度值需要在各次飞行中进行归一化处理
LiDAR的优势
所有数据从一开始就有地理参照
精度高
能迅速覆盖大面积
与摄影测量方法相比,周转快,劳动强度低,成本低
数据可以在陡峭的地形和阴影中收集
可以产生DEM和DSM
LiDAR的缺点
无法穿透非常密集的树冠,导致高程模型错误
大数据集难以解释和处理
没有国际协议
成本
200美元-300美元/平方英里-3米分辨率
350美元-450美元/平方英里-1米分辨率
LiDAR数据预处理
机载计算机以系统供应商专有的格式收集数据
后处理,校准多条飞行线,过滤错误的值和噪音
按类别对返回物进行分类:第一次返回物、最后一次(或裸地)返回物等。
LiDAR数据格式
供应商通常使用点值ASCII点文件或LAS格式交付
LAS格式
LiDAR数据交换格式标准
保持数据的公共二进制文件格式LIDAR性质的特定信息不会太复杂
由ASPRS维护
http://www.lasformat.org/
LAS文件组件
公共头块
记录可变长度(VLR)
投影、元数据、波形包。用户定义的数据
点数据记录
格式0(20字节)- 普通属性
格式1(28字节)- 格式0 GPS时间(8字节)
格式2(26字节)- 格式0 RGB(6字节)
格式3(34字节)- 格式2 GPS时间
格式4(57字节)- 格式1 波形包(29字节)
格式5(63字节)- 格式3 波形包
格式6- 10- 用于系统>15返回
扩展可变长记录(EVLR)
LiDAR处理软件
QT Modeler
TerraScan
ArcGIS (Workstation, LiDAR Analyst, 3D Analyst, LP360)
Leica Photogrammetry Suite
ENVI LiDAR
典型的LiDAR到DEM处理步骤
- 将 "原始 "点导入GIS格式
- 将点转换成表面的TIN模型
- 将TIN模型转换为地表的光栅模型
第1步–导入点
多个LiDAR x/y/z回报被转换为单独的GIS数据集
通常使用典型的 "生成 "功能
大型数据集会使许多GIS应用程序不堪重负
第2步–创建TIN模型
三角不规则网络
通常使用德劳内三角法创建,所有的点都与最近的两点相连
德劳内三角法是尽可能的等角
确保表面上的任何一点都尽可能的接近三角结点
第2步–创建TIN模型
x/y/z返回点成为TIN模型三角形的节点
因此三角形边和面的斜率是已知的
TIN模型允许三角形节点之间的高程值线性插值
比直接将点返回转换为光栅数据更能保持 “边缘”
第2步–创建TIN模型
TIN模型是对地表的有用表示
对于LiDAR数据,由于其复杂度较低,绘图速度较快,一般倾向于采用光栅模型作为最终产品
第3步–创建栅格模型
栅格数据以一系列有规律的统一数据单位(像素)存储高程值
基于栅格的地表模型被称为数字高程模型(DEM)
基于栅格的地表以上特征模型通常被称为数字表面模型(DSM)
第3步–创建光栅模型
光栅数据可以从TIN模型中创建,方法是使用线性插值法对每个像素中心点的高程值进行插值
最小分辨率取决于LiDAR返回的分辨率–经验法则:每个像素平均有一个脉冲
其他产品–高度图像
通过从第一个回报中减去裸地回报创建–创建树木、建筑和其他地表特征高度的光栅图像
其他产品 – 遮阳板
通过考虑太阳和阴影的照明角度创建的阴影浮雕图像
用于在2D中查看3D模型
光源通常来自北方;这产生了最具有视觉吸引力的图像
其他产品 – 等高线
可以从TIN或栅格模型中创建
适当的间隔取决于LiDAR数据的垂直精度。(等值线的间隔应至少是垂直精度的两倍,即
俄勒冈州的公共领域LiDAR
http://www.blm.gov/or/gis/lidar.php
OSU ftp: ftp://lidar.engr.oregonstate.edu/
USGS NED (3m DEM) and Earth Explorer (las)
ESRI ArcGIS
ArcGIS点文件信息工具
ArcGIS LAS数据集工具
ArcGIS 10.X LAS数据集
一个LAS数据集可以
在ArcGIS中使用ArcMap和ArcScene的2D和3D功能。
根据应用于点云的某些激光雷达过滤器,使用高程或点属性渲染器将其显示为点。
渲染为三角形的表面模型。
根据某些激光雷达过滤器,使用高程、坡度、角度或等高线进行可视化。
用于对源LAS文件进行更新
原文链接
提取码:zio0


