基于接收信号强度(RSS)的室内定位/无线传感器网络定位——极大似然估计ML/最小二乘估计WLS
时间:2022-10-27 02:00:00
基于接收信号强度(RSS)室内定位/无线传感器网络定位-估计非常大ML/估计最小二乘WLS
原创不容易,路过的大佬请点赞
针对AOA,TOA,TDOA,RSS讨论室内定位、导航、技术支持等==代码(有偿)==欢迎联系,也可以站内私信,也可以基于其它算法,ML只是一个解释室内定位的例子
WX: ZB823618313
基于接收信号的强度(RSS)室内定位/无线传感器网络定位-估计非常大ML/估计最小二乘WLS
- 基于接收信号的强度(RSS)室内定位/无线传感器网络定位-估计非常大ML/估计最小二乘WLS
-
- 1. 室内定位/无线传感器网络定位技术
-
- 1.1. 室内定位/无线传感器网络定位分类
- 1.2. 室内定位/无线传感器网络定位
- 1.3. 室内定位/无线传感器网络定位技术分类
- 1.4. 比较室内定位/无线传感器网络定位技术
- 2. RSS定位介绍
-
- 2.1 RSS定位原理
- 2.2 RSS拓扑图
- 2.3 RSS定位测量
- 3. RSS定位算法概述
- 4. ML最大的似然估计RSS定位
-
- 4.1. 问题描述
- 4.2. ML估计
- 5. 仿真结果 1
-
- 5.1. 模拟场景(目标在传感器凸包之外)
- 5.2. 定位误差RMSE(随扰动增加)
- 5.3. 定位误差RMSE(随着传感器节点的增加)
1. 室内定位/无线传感器网络定位技术
近年来,随着无线通信、集成电路、传感器和微电系统技术的快速发展和日益成熟,无线传感器网络被誉为未来三大高科技产业之一(WSN,Wireless Sensor Network)引起了全世界的广泛关注。随着物联网概念的提出,传感器技术作为其关键技术已成为研究的核心。随着无线传感器网络的应用逐渐深入到人们生活的各个方面,其核心支持的节点定位技术也得到了不断的改进和推广。
1.1. 室内定位/无线传感器网络定位分类
在无线传感器网络定位中,有两种情况:网络中检测节点的自定位和未知目标源的盲定位。
节点自定位:
由节点本身携带GPS通过自定位系统获得的自定位节点称为信标节点,也称为锚节点。
节点的盲定位:
未知目标源的位置根据信标节点的定位机制确定。节点盲定位可分为有源定位和无源定位两类。
有源定位:
网络中的监测节点利用有源设备(雷达、激光、声纳等)向定位目标发送各种定位信号,然后通过一系列测量和处理接收监测目标的返回信号。
优点: 全天候、高精度
缺点: 无隐蔽性,易受电子干扰
无源定位:
在定位过程中,网络中的监控节点不向定位目标发送信号(电磁或其他定位信号)。监控节点与监控设备之间没有协作通信。监控节点只能通过搜索、测量和处理目标上发送的电磁信号来获得目标的位置和参数信息,从而实现定位跟踪。
优点: 反侦察、抗干扰、目标识别(弥补有源雷达的不足)
目前主要研究的定位算法是被动无源定位。
被动: 监测网络对被监测目标无法进行控制,无法按照自身定位需求添加软硬件支持。
1.2. 室内定位/无线传感器网络定位
基于无线传感器网络的信号无源定位和跟踪具有以下特点:
无源定位,直接定位方不向目标信号发送信号
多站协作,监控节点需要多次测量,空间移动,或多站之间有信息交互协作
计算量大,获取目标位置所需的计算量高于其他信息
定位精度、系统内参和定位节点的数量及布局
1.3. 室内定位/无线传感器网络定位技术分类
通过测量不同节点与目标信号之间的距离或角度信息,的距离或角度信息来估计未知目标节点的位置。
常用定位技术:
- 到角度技术(AOA)
- 实现时间技术(TOA)
- 到达时差技术(TDOA)
- 接收信号能量技术(RSSI)(最后轮到最熟悉的定位技术了)
1.4. 比较室内定位/无线传感器网络定位技术
| 技术名称 | 定位精度 | LOS/NLOS | 定位信息 | 优点 | 缺点 |
|---|---|---|---|---|---|
| AOA | 中、高 | LOS | 角度 | 只需要两个接收器。 不需要同步时间 | 需要天线阵列,价格昂贵 |
| TOA | 高 | LOS | 距离 | 精度高 | 同步时间需要三个接收器、发射源和目标 |
| TDOA | 高 | LOS | 距离差 | 高精度只需要同步发射源 | LOS假设 |
| RSS | 低 | both | 信号强度 | 简单,成本低 | 精度低的三个节点 |
2. RSS定位介绍
2.1 RSS定位原理
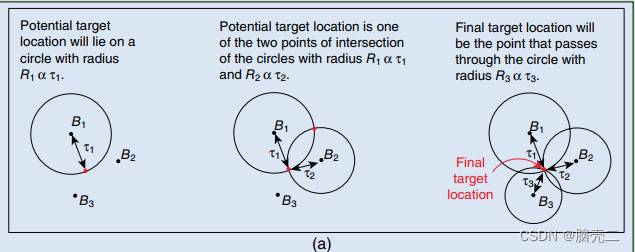
核心思想:与TOA类似,在RSSI在中间,多个基本节点通过三角定位协作定位目标节点(见下图)。然而,锚节点没有测量TOA,而是使用RSS进行估计。在这种方法中,接收信号的强度表示信号传播的距离。对于共面情况,假设传输强度和信道(或信号传播的环境)特征已知,需要三个基本节点和三个RSS测量。
RSS定位可以NLOS环境定位,成本极低,无需额外设备
2.2 RSS拓扑图
定位原理:RSS定位法是根据接收信号的强度实现定位。RSS测量是一种关于距离(目标到传感器节点)的衰减函数,因此可以使用TOA定位原理。与TOA不同的是,TOA可以直接得到距离。在定位过程中,根据物理模型计算三个不同参考点的信号强度,然后使用和TOA定位点可以通过类似的几何到定位点。该方法至少需要三个基站来计算目标的位置,其定位图如图所示。
2.3 RSS定位测量
RSS传感器接收到的平均功率来自发射源。通常假设接收功率遵循指数衰减模型,即发射功率、路径损耗常数和源与传感器之间的距离。比使用更多的定位方案TOA、TDOA或TSOA由于源与/或传感器之间没有同步,测量方案很简单。一旦我们能做到RSS在测量中获得距离就像TOA同样,至少使用三个接收器来确定源位置。
RSS假设源发射功率为 P t P_t Pt,在没有干扰的情况下,第 i i i个传感器接收到的平均功率为 P i P_i Pi,模型为
P i = K i P t d i − α = K i P 0 ∣ ∣ x − x i ∣ ∣ − α , i = 1 , 2 , ⋯ , N P_i=K_iP_td_i^{-\alpha}=K_iP_0||\mathbf{x}-\mathbf{x}_i||^{-\alpha},~i=1,2,\cdots,N Pi=KiPtdi−α=KiP0∣∣x−xi∣∣−α, i=1,2,⋯,N
其中 K i K_i Ki是影响接收功率的所有其他因素,包括天线高度和天线增益,而 α \alpha α是路径损耗指数。基于不同的信号传播环境, α \alpha α从2到5。一般在无遮挡空间(free space)中, α = 2 \alpha=2 α=2。
现场试验表明,RSS扰动呈对数正态分布。因此,RSS对数正态路径损失模型可表示为
r R S S , i = P 0 − 10 α log d i d 0 + n i , i = 1 , 2 , ⋯ , N r_{RSS,i}=P_0 - 10\alpha\log\frac{d_i}{d_0}+n_i,~i=1,2,\cdots,N rRSS,i=P0−10αlogd0di+ni, i=1,2,⋯,N
其中 d i = ( x − x i ) 2 + ( y − y i ) 2 d_i=\sqrt{(x-x_i)^2+(y-y_i)^2} di=(x−xi)2+(y−yi)2
x = [ x , y ] ′ \mathbf{x}=[x,y]' x=[x,y]′为发射源的位置,即被定位的参数, y i = [ x i , y i ] ′ \mathbf{y}_i=[x_i,y_i]' yi=[xi,yi]′为第i个锚节点的位置,假设存在N个锚节点构成传感器网络,则 i = 1 , 2 , ⋯ , N i=1,2,\cdots,N i=1,2,⋯,N。 n i n_i ni 为测量噪声,来源于RSS的干扰。
3. RSS定位算法概述
主要算法: 基于AOA技术的室内定位可以分为两大类方法:参数估计算法和滤波方法。
1-参数估计算法主要解决非移动目标(如传感器节点、发射源等)的定位问题,主要包括:
ML最大似然估计
LS最小二乘估计
WLS加权最小二乘估计
NLS非线性最小二乘估计
凸规划
**注意:**这类方法也可以解决移动目标的室内外定位问题。
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
2- 滤波方法主要解决移动目标(如智能小车、移动机器人、移动终端等)的室内外定位问题,主要包括:
扩展卡尔曼滤波EKF
无迹卡尔曼滤波UKF
容积卡尔曼滤波CKF
求积卡尔曼滤波QKF
中心差分卡尔曼滤波CDKF
Divided difference filter DDF
高斯混合滤波GSF
强跟踪滤波STF
粒子滤波PF
… …
4. ML最大似然估计RSS定位
4.1. 问题描述
考虑N个传感器网络,RSS对数正太阴影衰减(路径衰减)模型可表示为
r R S S , i = P 0 − 10 α log d i d 0 + n i , i = 1 , 2 , ⋯ , N r_{RSS,i}=P_0 - 10\alpha\log\frac{d_i}{d_0}+n_i,~i=1,2,\cdots,N rRSS,i=P0−10αlogd0di+ni, i=1,2,⋯,N
其中 d i = ( x − x i ) 2 + ( y − y i ) 2 d_i=\sqrt{(x-x_i)^2+(y-y_i)^2} di=(x−xi)2+(y−yi)2
x = [ x , y ] ′ \mathbf{x}=[x,y]' x=[x,y]′为发射源的位置,即被定位的参数, y i = [ x i , y i ] ′ \mathbf{y}_i=[x_i,y_i]' yi=[xi,yi]′为第i个锚节点的位置,假设存在N个锚节点构成传感器网络,则 i = 1 , 2 , ⋯ , N i=1,2,\cdots,N i=1,2,⋯,N。 n i n_i ni 为测量噪声,来源于RSS的干扰。
4.2. ML估计
基于N个锚节点的RSS测量,构造似然函数:
P ( r R S S ∣ x ) = ∏ i = 1 N 1 2 π σ i e − ( r R S S , i − h ( x ) ) 2 2 σ i 2 P(\mathbf{r_{RSS}}|\mathbf{x})=\prod_{i=1}^N\frac{1}{\sqrt{2\pi}\sigma_i}e^{-\frac{(r_{RSS,i}-h(\mathbf{x}))^2}{2\sigma_i^2}} P(rRSS∣x)=i=1∏N2πσi1e−2σ


