V-REP笔记:力传感器的配置和使用
时间:2022-08-30 16:30:00
文章目录
- 1.Force Sensors的添加
- 2. 传感器 介绍
- 3. 传感器属性设置
- 4. API使用和数据可视化
- 5. 应用场景
1.Force Sensors的添加
Add→Force sensor
然后拖到响应模型树的位置,调整位置
2. 传感器 介绍
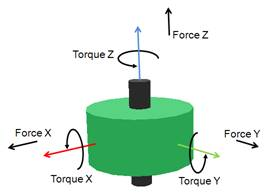
如上图所示,Force sensor它是一种六维力传感器,可分别测量x、y在传感器周围施加和z轴的力x、y在传感器上施加Z轴的扭矩。
关节中的扭矩可以直接通过API函数simxGetJointForce本文主要记录传感器的使用,不涉及关节扭矩的获取。
Force sensor相当于刚性连接。在模拟过程中,如果外力超过指定的力/扭矩阈值或满足其他用户定义的某些条件,力传感器可能会损坏,即刚性连接将损坏。
注意:要想力传感器工作,必须enable动力学属性
力传感器的本地帮助文档位于:①
CoppeliaSim_Edu_V4_0_0_Win/helpFiles/en/forceSensors.htm;②forceSensors.htm
3. 传感器属性设置
- Filter:通过力传感器获取力或扭矩数据时,会累积并过滤,以降低抖动值。
- Sample size:滤波器应使用的值。默认值1为无滤波器(原输出)。
- Average value:如果选择,传感器将提供平均值(样本的平均值)
- Median value:如果选择,传感器将提供样本中值
- Trigger settings:触发器可以设置一些自动触发条件来调用触发器回调函数
simBreakForceSensor,具体参考手册 - Force threshold:设置力矢量阀值
- Torque threshold:设置扭矩矢量阀值
- Consecutive threshold violations for breaking:允许传感器在触发前连续超过阀值
- Object size:调整传感器3D表示大小,没有实际功能
- Adjust color A / B: 可调整力传感器的两种颜色
4. API使用和数据可视化
- Step1:使用
simxGetObjectHandle获取传感器Handle - Step2:通过Handle调用
simxReadForceSensor
参见手册Remote API
数据可视化方案:
- 方案1:用相应的语言调用相应的包,如MATLAB使用plot
- 方案2:在V-REP中使用
Graph工具可视化,下图为5㎏机械臂末端重物自由落体产生的力数据
注意:使用Bullet和ODE发动机时,接触边界也进行了碰撞计算,这将导致数据跳动不正确。解决方案:Common碰撞掩码设置在中间(mask),使其掩码位错开,无碰撞计算
看看大佬做的称重器:
5. 应用场景
- 机械臂末端力传感器
- 检测爪夹持力
- 足式机器人地面接触力检测
- 其他
参考文献:
- https://www.cnblogs.com/21207-iHome/p/6734035.html
- https://www.cnblogs.com/21207-iHome/p/8118222.html(陀螺仪加速度计)
- https://blog.csdn.net/qq_29945727/article/details/98482449
- https://forum.coppeliarobotics.com/viewtopic.php?f=9&t=6614
- 官方手册


