解读跨阻放大器的结构特性与应用
时间:2021-03-25 10:50:58
用于测距和检测的光主要用于这些关键应用,如先进的驾驶员辅助系统(ADAS)、光学检测和测距(LiDAR)和未来的自动驾驶汽车,以及移动脉搏血氧仪。
用于测距和检测的光用于这些关键应用,如先进的驾驶员辅助系统 (ADAS)、光检测和测距仪 (LiDAR) 和未来的自动驾驶汽车,以及移动脉冲氧计。然而,心跳的可靠性在很大程度上取决于检测电路的准确性和稳定性。
该电路的关键元件是跨阻放大器(TIA),它将低电平光电二极管电流信号转换成可用的电压输出。虽然TIA并不新鲜,但是设计师在稳定实现上有很多困难,其中之一就是隐藏寄生效应。
这个性质将描述 tia 的结构,以及寄生效应和其他性质。然后推导出一个简单的方程,以帮助设计一个稳定的电路,并介绍了一个适合实际应用的放大器。
跨阻抗放大器信号增益
交叉阻抗放大器电路由光数据、放大器和反馈电容器/电阻对组成(图 1)。电路看似简单,但隐藏的寄生效应在不知不觉中会导致不必要的电路不稳定。

图1:零反向进行偏置,互阻抗分析运算放大器设计电路。它看起来可以很简单,但寄生效应会影响导致社会不稳定。(图像数据来源:Digi-KeyElectronics)
照射光电二极管的光产生电流(IPD)(从二极管的阴极流向阳极)(图1)。
图 1 标题中的"零反向偏差"表示光电极两端的电压为 0 伏特。如果光阳极两端的反向偏差为 0 伏,则泄漏或暗电流较低,并且光阳极的凝结电容比具有较大反向偏差的配置具有更高的凝结电容。
交流进行信号TIA电路的增益控制主要发展取决于放大器反馈环路中的电阻和电容。公式1表示图1的理想社会交流和直流信号信息传递相关函数。
该公式表明,单极频率响应取决于反馈元件,但这并不能解释 tia 有时会振荡的原因。
噪声增益是该系统的第二个增益方程。像每个放大器电路一样,放大器开环增益和噪声增益交点的波特图定义了电路的稳定性。如果该交越以20dB/10倍的闭合率发生,电路相位裕量大于或等于45度。如果这两条曲线的闭合率大于20dB/十进制,则电路相位裕度小于45度。
虽然工作稳定性进行理论研究表明0度的相位裕度会导致企业边际社会稳定性,但实际上我们推荐的系统达到最小值为45度。具有45度相位裕度的电路将产生23%的过冲阶跃响应国家行为。
TIA噪声增益响应
要找到放大器的开环增益曲线,请参阅器件的数据表。

图2:零反向偏置TIA电路,以在简化模式下观察光泽和放大器。本版本考虑了光德二极管结和放大器寄生输入电容器的特性。(图片来源:迪吉-基电子)
光电二极管模型具有DPD、Ipd、CPD和Rsh元件。DPD代表理想二极管,IPD代表光产生的电流。光电二极管和应用环境决定了IPD的最大值。光电二极管的结电容CPD是光电二极管中磷和氮材料界面产生耗尽区的结果。分流电阻Rsh等于零偏置光电二极管的有效电阻。这种寄生电阻是pn结的结果,在DC通常等于几十亿欧姆。

在放大器的同相和反相输入端有三个寄生电容。Ccm 是交流非反相和反相输入寄生电容。对于 cmos 和 fet 器件,这是栅极和静电放电单元的交流接地电容。Cdiff 是非反相和反相输入晶体管门极之间的寄生电容。
对于以下噪声计算,放大器输入端的电容相互并联。Cin器件包括光电二极管的结电容、运算放大器的共模反相输入电容和运算放大器的差分输入电容。所有这些电容都是并联的,因此它们被加在一起以定义Cin值。Cin表示运算放大器输入端的电容组合为CPD+CDIFF+CCM。请注意,在Cin计算中只有一个CCM项。这是因为同相输入CCM上的节点处于交流等值。
等式2表示图2中的噪声信息增益传递相关函数(根据学生运算放大器的非反相输入数据计算)。p》
根据公式2,可以通过公式3和公式4容易地识别噪声增益传递函数中的零频率(Fz)和极点频率(Fp)。
跨阻放大器稳定性
选项 3 和 4 提供了绘制 Pod 图上的噪声增益曲线的工具。例如,端口图显示三个样本噪声增益曲线叠加在操作放大器的开环增益上(图 3)。
图3: 叠加在开环增益曲线上的三条噪声增益曲线的运算放大器
波特图有助于快速确定光电二极管系统在噪声增益曲线与运算放大器开环增益曲线相交处的稳定性。对两条曲线的变化率进行估计,以粗略确定其稳定性。
表1定义了三种噪声增益曲线的稳定性条件。对于1号噪声增益曲线,曲线截取放大器开环(AOL)曲线,变化率等于40dB/十进制。该交点反映了小于45度的相位裕度。相位裕度小于45度的电路略微稳定,阶跃响应过冲超过23%。当fp1频率增加到截距频率以上时,可能会发生振荡。
交叉点处的Aol斜率进行噪声标准曲线斜率
交叉口变化率的估计相位
系统BR是否稳定?噪声增益曲线 1 号 -20dB/
decade+20dB/
decadeΔ40dB/
decade《《45°不稳定,23%过冲2号噪声增益曲线-20dB/
十年+0dB/
十年Δ20dB/
十年》》45°稳定,
“23% 超调3号噪声增益曲线-20db/10 ~ 0db/“ br”10年! 20db/
十年45°稳定,
〜23%过冲
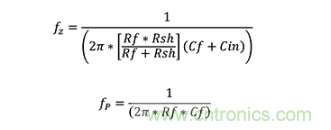
表1:稳定性的波特图分析(图像来源:Digi-KeyElectronics)
对于2号噪声信息增益变化曲线,曲线在噪声控制增益进行曲线比较平坦后很好地截取Aol曲线。在这种教学设计中,闭合工作速率可以等于20dB/decade。但是,相位裕度大于45度,从而能够形成一个非常具有稳定的电路。此响应的过冲率远低于23%。随着fp2频率的降低,过冲值减小。
对于噪声增益曲线3号曲线,在极频FP3处准确地截取了AOL曲线。
在设计的这一点上,可以估计反馈电容器 (Cf) 的价值。对于单位增益稳定操作放大器,公式 5 提供了有用的 CF 估计值,创建了 45 度电路相距。
ADAS 和激光雷达放大器解决方案
在 adas 和激光雷达应用中,传感器执行的位置感知活动要求它们快速。适用于 adas 和激光雷达系统的组件是光电二极管4300和 adi 的 ada4666-2放大器(图4)。光电二极管对可见光和近红外线非常敏感。这种高速光电探测器适用于位置感应、高速数据传输、光电探测、光开关和编码器。该系统的 tefd43000v 偏置结电容(cpd)为3.3 pf,并联电阻(rsh)为67g,最大期望输出电流为10a (ipdmax)。
图4:使用ADI公司ADA4666-2放大器和VishaySemiconductorTEFD4300光电二极管的ADAS和LiDARTIA系统。(图片来源:Digi-KeyElectronics)
对于ADA4666-2,输入共模电容(CCM)等于3pF,输入差分电容(CDIFF)等于8.5pF。增益控制带宽积(GBWP)等于4MHz。在该系统中,电源为5V,放大器的输出摆幅为1V至4V.为实现此输出摆幅,VREF等于1V.为实现4V的最大价值输出摆幅,反馈进行电阻(Rf))等于(VoutMax-VoutMin)/IpdMax=(4V-1V)/10μA=300k欧姆。
根据上面的值,Cin=Ccm+Cdiff+Cpd=14.8pF。
脉搏血氧仪
脉冲氧表光电传感系统的适当组件是 lunaOpto 电子 PDB-C152SM 蓝色增强硅 PIN 光电二极管和德州仪器 OP363 放大器(图 5)。LunaPDB-C152SM 蓝色增强型硅 PIN 光压成像台是低成本、高速光检测器,最大光谱响应为 950nm。PDB-C152SM0V 偏结电容器 (CPD) 为 15pF,分离电阻器 (Rsh) 为 500Mohm。在此系统中,最大预期输出光多电流为 10μA(IpdMax)。

图5:使用美国德州电子仪器OPA363放大器的脉搏血氧仪TIA系统和LunaOptoelectronicsPDB-C152SM光电检测二极管。(图像数据来源:Digi-KeyElectronics)
对于 opa363,输入共模电容(ccm)等于3pf,输入差分电容(cdiff)等于2pf。增益带宽乘积 = 7兆赫。在这个系统中,电源为5v,放大器的输出摆幅为1v 到4v,达到这个输出摆幅,vref 等于1 v,达到4v 的最大输出摆幅,反馈电阻(rf)等于(voutmax-voutmin)/ipdmax = (4v-1v)/10a = 300kohms。
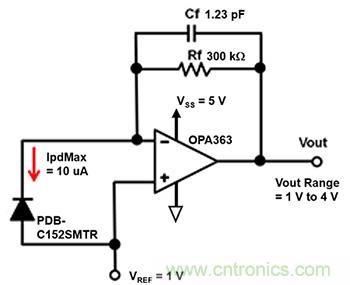
Cin值=CCM+CDIFF+CPD=20pF。应用公式5,Cf~1.23pF。
结论
本文进行简要分析讨论了三个方面简单计算公式的推导,以帮助学生设计工作人员为所有跨阻抗放大器创建一个稳定的电路。这些公式涉及互阻抗放大器的信号和噪声增益的推导。
用于TIA的放大器具有低输入偏置电流、低输入失调电压和足够的频带。


