#defineucharunsignedchar
#defineuintunsignedint
#defineulongunsignedlong
#defineCLK_WISE0//顺时针方向转动
#defineINVERSE1//逆时针方向转动
bitdirection=CLK_WISE;/***方向标志,取值为CLK_WISE或INVERSE*/
staticucharspeedcount=0;//加速标志,越大转速越快,最大到7,然后回归到0,循环。
//程序中可以依据它来改变占空比
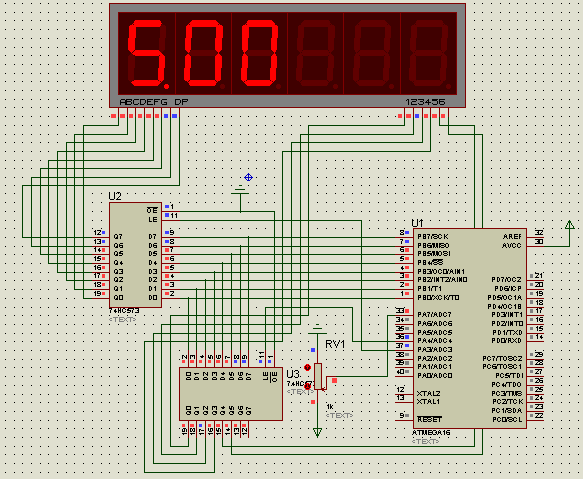
ucharstep[8]={0x01,0x09,0x08,0x0c,0x04,0x06,0x02,0x03};//8个步
ucharth_0[8]={0x5D,0x85,0x9E,0xAE,0xBA,0xC2,0xC9,0xCF};//8个定时器值,高8位
uchartl_0[8]={0x3D,0xEE,0x58,0x9E,0x3E,0xF7,0xBF,0x2C};//8个定时器值,低8位
intstep_i=0;//当前处于哪一步
/***定时器t0***/
voidtime0(void)interrupt1using1
{
P2=step[step_i];//输出控制信号
if(direction==CLK_WISE) //顺时针转
step_i++;
else
step_i--;//逆时针转
if(step_i>7)//顺时针到最后一步,需要调整到第一步
step_i=0;
if(step_i<0)//顺时针到第一步,需要调整到最后一步
step_i=7;
TH0=th_0[speedcount];//根据当前速度设定定时器初值
TL0=tl_0[speedcount];
}
/****改变转向标志*****/
voidint1_srv(void)interrupt2using2
{
if(I1==0)
{
while(!INT1);
direction=!direction;
}