将 DMSP/OLS 夜间灯光时间序列扩展到 2013 年以后
时间:2023-12-10 02:37:02
1.综述
国防气象卫星计划业务线扫描系统 (DMSP-OLS) 美国国家海洋和大气管理局收集的传感器数据 (NOAA) 地球观测组 (EOG) 存档和处理,自制 1994 全球夜间图像地图自200。多年来,EOG 通过消除火灾和渔船中的瞬态光,开发了自动算法 OLS 稳定光复合材料由波段数据制成。由于其高亮度和短持续时间,短光被移除。但是,原来的收DMSP数据中的六颗卫星逐渐从昼夜轨道转移到黎明/黄昏轨道,即更早的穿越时间。2014年初,F18卫星不再收集可用的夜间数据,重点已转移到可见红外成像辐射计套件的处理 (VIIRS) 日/夜波段 (DNB) 全球夜间数据图像。尽管如此,人们很快发现 F15 和 F16 卫星从 2012 黎明前的夜间数据从年开始收集。因此,从 2013 从几年前建立的算法扩展到处理 OLS 数据。此外,2013-DMSP 卫星 F18 和 F15 晚上和黎明前三个立交时间的夜间数据和午夜后的存在 VIIRS 的夜间数据的存在,使得对三个不同立交时间的图像进行相互校准成为可能并研究夜间灯光的昼夜模式。人们很快就发现了 F15 和 F16 卫星从 2012 黎明前的夜间数据开始收集。因此,从 2013 年开始,前几年建立的算法被扩展到处理 OLS 数据。此外,2013-DMSP 卫星 F18 和 F15 晚上和黎明前三个立交时间的夜间数据和午夜后的存在 VIIRS 夜间数据的存在使得校准三个不同立交时间的图像成为夜间照明的昼夜模式。人们很快就发现了 F15 和 F16 卫星从 2012 黎明前的夜间数据开始收集。因此,从 2013 从几年前建立的算法扩展到处理 OLS 数据。此外,2013-DMSP 卫星 F18 和 F15 晚上和黎明前三个立交时间的夜间数据和午夜后的存在 VIIRS 夜间数据的存在使得校准三个不同立交时间的图像成为夜间照明的昼夜模式。
2.材料和方法
2.1材料
OLS 用于检测月光云,光电倍增管 (PMT) 用于增强可见波段信号。但由于这种强化,城市的灯光、火灾、渔船、煤气灯等也会被检测到。有些灯光来源短,如火灾和渔船,而城市灯光则更持久。一年一度的稳定灯复合材料通过检查进入复合产品的可见光带的分布,将瞬态源与更持久的源隔离开来。虽然 OLS 收集微光成像数据的能力是独一无二的,但也存在空间分辨率粗糙、6等缺陷 定量和有限的动态范围导致城市中心饱和。以下部分。
2.2创建 OLS 稳定灯组合步骤
2.21预处理
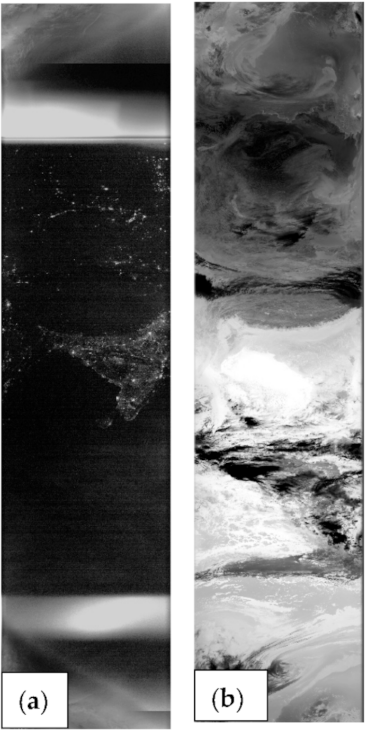
图:亚洲上空轨道 F15201801162050 的夜间部分 (a) OLS 可见波段 (0.4–1.1 μm);(b) 伴随旗带,DAYTTIME 显示为红色,NIGHTTIME MARGINAL 绿色。
从美国海军天文台设置的零月球照度标志是月球照度值 [25]计算出获得的算法。该算法根据月相、方位角和仰角估计地球表面的月球照度,月相、方位角和仰角根据每个月相 OLS 计算每条扫描线的纬度和经度以及最低点像素的时间。当返回的月球照度小于 0.0005 lux 设置零月球照度标志。有时,OLS 夜间子轨道上可能没有实际数据,但作为占位符存在扫描线。为这些区域设置 NO DATA 标志。
SOLVER.BASE_LR = 0.00025
SOLVER.MAX_ITER = 10,000
图 示: 亚洲上空轨道 F15201801162050 的 OLS 可见波段夜间部分。( a ) 黄线表示NN显示的起始线和结束线;( b ) 伴旗带,DAYTTIME 显示为红色;和 NIGHTTIME MARGINAL 显示为绿色;黄色区域被神经网络算法选择的线丢弃;蓝色区域显示扫描边缘数据。
图 示. NCEP GFS 0.5 度表面温度网格,用于创建轨道 F15201801162050 的云掩模。所有时间都是UTC。(一)2018年1月16日18:00模型网格;( b ) 2018 年 1 月 16 日 21:00(18:00 模型运行的 3 h 预测网格);( c ) 2018 年 1 月 17 日 00:00 模型网格。
图 示. 左 3 个面板显示了图 5 中的 NCEP GFS 0.5 度表面温度网格,它们在空间上映射到 OLS 轨道 F15201801162050。右侧的面板显示了表面温度网格之间的线性插值结果,以匹配 OLS 轨道 F15201801162050 的扫描线时间。OLS 扫描线时间显示在垂直时间轴上。
图. ( a ) F15201801162050 轨道的 OLS 热带;( b ) 表面温度网格(空间和时间插值以匹配 OLS 轨道);( c ) 温差图像。( d ) OLS 热带,生成的云罩覆盖为蓝色。
2.22重投影
图 . 数据重新投影到 30 弧秒网格,仅中间带。( a ) OLS 可见带;( b ) OLS 热带。( c ) 伴随旗带,蓝色显示的云和绿色显示的 NIGHTTIME MARGINAL
2.23. 制作复合材料
图 . F152018 的 OLS 复合产品,显示 ( a ) 无云观测的数量;( b ) 平均可见波段观测值;( c ) 澳大利亚城市的可见波段直方图示例。
2.24离群值去除
图 . ( a ) 包含火灾的网格单元的可见波段直方图示例;( b ) 一个包含小镇的网格单元。异常值去除过程去除了两个直方图示例中用垂直黄线显示的最高观测值。
这一步的输出是一个新的去除异常值的平均可见波段合成,它是通过使用标准偏差收敛后剩余的观测值创建的,或者在没有收敛时考虑所有观测值。
图 . F152018 的 OLS 复合产品,显示澳大利亚。( a ) 平均可见光带;( b ) 去除离群值的平均可见波段。请注意,去除异常值的复合产品中的火已被去除。F152018 的 OLS 复合产品,展示了中国和韩国的沿海水域。( c ) 平均可见光带;(d)去除异常值的平均可见带。请注意,在去除异常值的复合产品中,渔船活动已在很大程度上被去除。
2.25背景去除
图 F152018 的 OLS Composite 产品,经过裁剪以显示越南河内周围的区域。( a ) 去除异常值的平均可见波段,显示分析师选择的红色、绿色和黄色无光区域;( b ) 稳定灯罩;( c ) Stable Lights,这是应用了 Stable Lights 蒙版的平均可见波段。请注意,在世界的这个地区,超过 50% 的时间都有来自渔船的灯光,因此它们成为稳定灯产品的一部分。
2.26地理定位
图 . F152018 稳定灯显示了 2016 年在美国佛罗里达群岛重新采样的 VIIRS DNB 网格。OLS Stable Lights 图像显示为红色,重新采样的 VIIRS DNB 网格显示为青色。两个图像之间的重叠区域以白色显示。( a ) 显示佛罗里达大部分地区的图像;( b ) 佛罗里达群岛的详细信息,在地理对齐之前;( c ) 在地理对齐后佛罗里达群岛的细节。这个卫星年的偏移是 x = 4, y = 1。
2.3 相互校准 2013 年夜间图像以研究昼夜模式
图 ( a ) 波斯湾耀斑的 RGB 图像,R = 去除异常值的 F182013,G = DVNL,B = 去除异常值的 F152013。显示穿过其中一个耀斑绘制的横断面;(b)图(a)所示横断面的DN值的剖面。
相互校准是通过二阶多项式拟合开发的,在 X 轴上采用 DNVL 2013,在 Y 轴上采用去除异常值的 DMSP F152013,然后在另一个方程中采用 X 轴上的 DVNL 和 Y 轴上去除异常值的 DMSP F182013 . 基于当 DVNL 为零时调整后的 F182013 和 F152013 将为零的假设,等式 (2)),截距取为零。导出的系数分别应用于 DMSP F152013 和 F182013 图像,以获得相互校准的图像:
DNadjusted = C 1 × DN + C 2 × DN 2 (2)
图 .相互校准 ( a ) DVNL 2013 与去除 DMSP 异常值的 F152013;( b ) DVNL 2013 针对 DMSP 离群值移除 F182013。
3. 结果
3.1. F152018 稳定灯复合材料
图 . F152018 稳定灯产品。
3.2. 夜间灯光中的昼夜模式
4. 讨论和结论


