HDLBits FSM
时间:2023-12-06 10:07:01
Rule90
module top_module( input clk, input load, input [511:0] data, output [511:0] q ); always@(posedge clk) begin if(load) q <= data; else q <= {
1'b0,q[511:1]} ^ {q[510:0],1'b0};//右移或左移 end endmodule Rule110
module top_module( input clk, input load, input [511:0] data, output [511:0] q ); always@(posedge clk)begin if(load)begin q <= data; end else begin q <= ~((~q & ~{
q[510:0],1'b0}) | (q & {q[510:0],1'b0} & {
1'b0,q[511:1]})); end end endmodule Conwaylife
这个生命游戏暂时不懂,以后再做
simple FSM1
module top_module( input clk, input areset, // Asynchronous reset to state B input in, output out);//
parameter A=0, B=1;
reg state, next_state;
always@(posedge clk or posedge areset)
begin
if(areset)
state <= B;
else
state <= next_state;
end
always@(*)
begin
case(state)
B: next_state = in ? B : A;
A: next_state = in ? A : B;
default: next_state = B;
endcase
end
assign out = state==B ? 1 : 0;
endmodule
后面几个和这个是类似的,就不重复写 了
Fsm3comb
module top_module(
input in,
input [1:0] state,
output [1:0] next_state,
output out); //
parameter A=0, B=1, C=2, D=3;
always@(*)
begin
case(state)
A: next_state = in ? B : A;
B: next_state = in ? B : C;
C: next_state = in ? D : A;
D: next_state = in ? B : C;
default: next_state = A;
endcase
end
assign out = state==D ? 1'b1 : 1'b0;
endmodule
Fsm3-onehot
module top_module(
input in,
input [3:0] state,
output [3:0] next_state,
output out); //
parameter A=0, B=1, C=2, D=3;
//用独热码写状态机,只关注其中一位的变化
// State transition logic: Derive an equation for each state flip-flop.
assign next_state[A] = state[A] & (~in) | state[C] & (~in);
assign next_state[B] = state[A] & in | state[B] & in | state[D] & in;
assign next_state[C] = state[B] & ~in | state[D] & ~in;
assign next_state[D] = state[C] & in;
// Output logic:
assign out = state[D];
endmodule
Design a moor FSM(Exams/ece241 2013 q4)
一开始没有搞懂题的意思是什么。搞懂意思才能知道状态转化
大概可以这么理解一下,有一个水池a,有s1,s2,s3三个传感器作为输入信号,用来指示水位的高低。然后有两个输出信号,相当于两个水池b,c,水位不足时,要从这两个水池向原来的水池a加水,然后根据传感器的状态不同,选择是从b和c哪一个水池向a水池加。
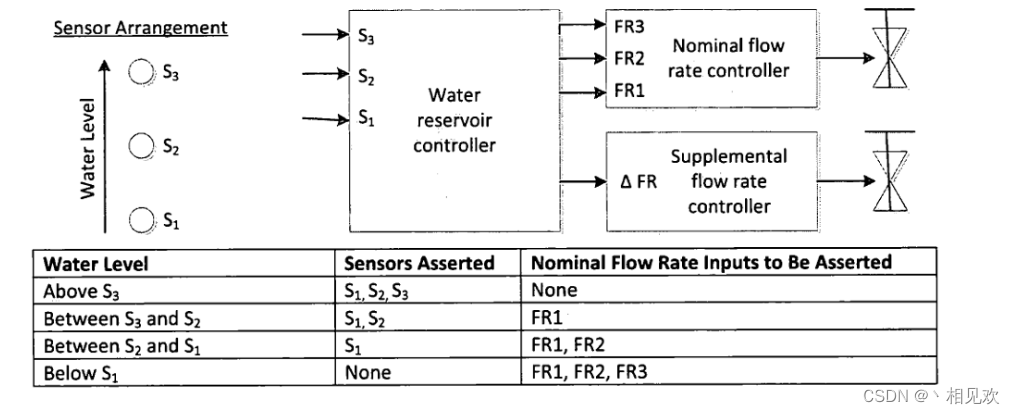
根据图表,可知状态变化。s[3:1]=000,001,011,111对应的输出会发生变化。
module top_module (
input clk,
input reset,
input [3:1] s,
output fr3,
output fr2,
output fr1,
output dfr
);
reg [2:0] cs,ns;
parameter idle = 3'd0;
parameter s1 = 3'd1;
parameter s2 = 3'd2;
parameter s3 = 3'd3;
always@(posedge clk)
begin
if(reset)
cs <= idle;
else
cs <= ns;
end
always@(*)
begin
case(cs)
idle:begin
case(s)
3'b001: ns = s1;
3'b011: ns = s2;
3'b111: ns = s3;
default: ns = idle;
endcase
end
s1:begin
case(s)
3'b001: ns = s1;
3'b011: ns = s2;
3'b111: ns = s3;
default: ns = idle;
endcase
end
s2:begin
case(s)
3'b001: ns = s1;
3'b011: ns = s2;
3'b111: ns = s3;
default: ns = idle;
endcase
end
s3:begin
case(s)
3'b001: ns = s1;
3'b011: ns = s2;
3'b111: ns = s3;
default: ns = idle;
endcase
end
default: ns = idle;
endcase
end
assign fr3 = cs==idle ? 1'b1 : 1'b0;
assign fr2 = (cs==idle || cs==s1) ? 1'b1 : 1'b0;
assign fr1 = (cs==idle || cs==s1 || cs==s2) ? 1'b1 : 1'b0;
//当前时刻水位与前一刻水位的高低决定dfr
//前一时刻低于当前,为0;反之为1
reg fr1_reg,fr2_reg,fr3_reg;
always@(posedge clk)
begin
fr1_reg <= fr1;
fr2_reg <= fr2;
fr3_reg <= fr3;
end
always@(*)
begin
if(~fr3 & fr3_reg | ~fr2 & fr2_reg | ~fr1 & fr1_reg)
dfr = 1'b0;
else if(fr3 & ~fr3_reg | fr2 & ~fr2_reg | fr1 & ~fr1_reg)
dfr = 1'b1;
end
endmodule
lemmings1
module top_module(
input clk,
input areset, // Freshly brainwashed Lemmings walk left.
input bump_left,
input bump_right,
output walk_left,
output walk_right); //
// parameter LEFT=0, RIGHT=1, ...
reg state, next_state;
parameter left = 0;
parameter right = 1;
always@(posedge clk or posedge areset)
begin
if(areset)
state <= left;
else
state <= next_state;
end
always@(*)
begin
case(state)
left: next_state = bump_left ? right : left;
right: next_state = bump_right ? left : right;
default: next_state = left;
endcase
end
assign walk_left = state==left;
assign walk_right = state==right;
endmodule
lemmings2
module top_module(
input clk,
input areset, // Freshly brainwashed Lemmings walk left.
input bump_left,
input bump_right,
input ground,
output walk_left,
output walk_right,
output aaah );
// parameter LEFT=0, RIGHT=1, ...
reg [1:0]state, next_state;
parameter left = 2'd0;
parameter right = 2'd1;
parameter g_left = 2'd2;
parameter g_right = 2'd3;
always@(posedge clk or posedge areset)
begin
if(areset)
state <= left;
else
state <= next_state;
end
always@(*)
begin
case(state)
left: next_state = ground ? (bump_left ? right : left) : g_left;
right: next_state = ground ? (bump_right ? left : right) : g_right;
g_left: next_state = ground ? left : g_left;
g_right: next_state = ground ? right : g_right;
default: next_state = left;
endcase
end
assign walk_left = state==left;
assign walk_right = state==right;
assign aaah = state==g_left || state==g_right;
endmodule
lemmings3
module top_module(
input clk,
input areset, // Freshly brainwashed Lemmings walk left.
input bump_left,
input bump_right,
input ground,
input dig,
output walk_left,
output walk_right,
output aaah,
output digging );
//定义状态,fall优先级最高,其次为dig,最后为切换方向
parameter left = 0;
parameter right = 1;
parameter fall_left = 2;
parameter fall_right = 3;
parameter dig_left = 4;
parameter dig_right = 5;
reg [2:0] cs,ns;
always@(posedge clk or posedge areset)
begin
if(areset)
cs <= left;
else
cs <= ns;
end
always@(*)
begin
case(cs)
left: ns = ground ? (dig ? dig_left : (bump_left ? right : left)) : fall_left;
right: ns = ground ? (dig ? dig_right : (bump_right ? left : right)) : fall_right;
fall_left: ns = ground ? left : fall_left;
fall_right: ns = ground ? right : fall_right;
dig_left: ns = ground ? dig_left : fall_left;
dig_right: ns = ground ? dig_right : fall_right;
default: ns = left;
endcase
end
assign walk_left = (cs==left) ? 1'b1 : 1'b0;
assign walk_right = (cs==right) ? 1'b1 : 1'b0;
assign aaah = (cs==fall_left || cs==fall_right) ? 1'b1 : 1'b0;
assign digging = (cs==dig_left || cs==dig_right) ? 1'b1 : 1'b0;
endmodule
lemmings4
module top_module(
input clk,
input areset, // Freshly brainwashed Lemmings walk left.
input bump_left,
input bump_right,
input ground,
input dig,
output walk_left,
output walk_right,
output aaah,
output digging );
//定义状态,fall优先级最高,其次为dig,最后为切换方向
parameter left = 0;
parameter right = 1;
parameter fall_left = 2;
parameter fall_right = 3;
parameter dig_left = 4;
parameter dig_right = 5;
parameter splatter = 6;
parameter act_end = 7;
//如果下降超过20个时钟,那lemmings就会死亡、输出为0,直到复位
//可以定义一个计数器。进行计时
reg [2:0] cs,ns;
reg [4:0] cnt;
always@(posedge clk)
begin
if(areset)
cnt <= 5'd0;
else if(ns==fall_left || ns==fall_right)
cnt <= cnt+1'b1;
else
cnt <= 5'd0;
end
always@(posedge clk or posedge areset)
begin
if(areset)
cs <= left;
else
cs <= ns;
end
always@(*)
begin
case(cs)
left: ns = ground ? (dig ? dig_left : (bump_left ? right : left)) : fall_left;
right: ns = ground ? (dig ? dig_right : (bump_right ? left : right)) : fall_right;
fall_left: ns = ground ? left : (cnt>5'd19 ? splatter : fall_left);
fall_right: ns = ground ? right : (cnt>5'd19 ? splatter : fall_right);
dig_left: ns = ground ? dig_left : fall_left;
dig_right: ns = ground ? dig_right : fall_right;
splatter: ns = ground ? act_end : splatter;
act_end: ns = act_end;
default: ns = left;
endcase
end
assign walk_left = (cs==left) ? 1'b1 : 1'b0;
assign walk_right = (cs==right) ? 1'b1 : 1'b0;
assign aaah = (cs==fall_left || cs==fall_right || cs==splatter) ? 1'b1 : 1'b0;
assign digging = (cs==dig_left || cs==dig_right) ? 1'b1 : 1'b0;
endmodule
FSM one-hot
module top_module(
input in,
input [9:0] state,
output [9:0] next_state,
output out1,
output out2);
//和状态机关系不大。没必要按照状态机写
assign next_state[0] = ~in & (state[0] | state[1] | state[2] | state[3] | state[4] | state[7] | state[8] | state[9]);
assign next_state[1] = in & (state[0] | state[8] | state[9]);
assign next_state[2] = in & state[1];
assign next_state[3] = in & state[2];
assign next_state[4] = in & state[3];
assign next_state[5] = in & state[4];
assign next_state[6] = in & state[5];
assign next_state[7] = in & (state[6] | state[7]);
assign next_state[8] = ~in & state[5];
assign next_state[9] = ~in & state[6];
assign out1 = state[8] | state[9];
assign out2 = state[7] | state[9];
endmodule
FSM ps2
module top_module(
input clk,
input [7:0] in,
input reset, // Synchronous reset
output done); //
parameter s0 = 2'd0;
parameter s1 = 2'd1;
parameter s2 = 2'd2;
parameter s3 = 2'd3;
reg[1:0] cs,ns;
//如果输入数据的第三位为1,指示接收数据的开始,然后3字节后完成
always@(posedge clk)
begin
if(reset)
cs <= s0;
else
cs <= ns;
end
always@(*)
begin
case(cs)
s0: ns = in[3] ? s1 : s0;
s1: ns = s2;
s2: ns = s3;
s3: ns = in[3] ? s1 : s0;
default: ns = s0;
endcase
end
assign done = cs==s3 ? 1'b1 : 1'b0;
endmodule
FSM ps2data
module top_module( input clk, input [7:0] in, input reset, // Synchronous reset output [23:0] out_bytes, output done); // parameter s0 = 2'd0; parameter s1 = 2'd1; parameter s2 = 2'd2; parameter s3 = 2'd3; reg[1:0] cs,ns; reg[23:0] out_bytes_reg; //如果输入数据的第三位为1,指示接收数据的开始,然后3字节后完成 always@(posedge clk) begin if(reset) cs <= s0; else cs <= ns; end always@(*) begin case(cs) s0: ns = in[3] ? s1 : s0; s1: ns = s2; s2: ns = s3; s3: ns = in[元器件数据手册、IC替代型号,打造电子元器件IC百科大全!


