KITTI数据集介绍
时间:2023-12-02 00:37:02
〖3D激光点云〗KITTI介绍数据集!
| 激光雷达点云bin文件读取和显示! |
首先声明文章主要参考以下作者:
- KITTI简介和使用数据集
- KITTI数据集数据初步体验
一. KITTI数据集简介
KITTI数据集由卡尔斯鲁厄理工学院和丰田美国技术研究院联合成立是世界上最大的计算机视觉算法评估数据集。该数据集用于评估立体图像(stereo),光流(optical flow),视觉测距(visual odometry),3D物体检测(object detection)和3D跟踪(tracking)计算机视觉技术在车载环境中的性能。KITTI真实图像数据包括市区、农村、高速公路等场景采集,每张照片中最多有15辆车和30名行人,还有各种程度的屏蔽和截断。整个数据集包括389对立体图像和光流图,39.2 km视觉测距序列超过200k 3D标记物体的图像组成为10Hz采样和同步频率。
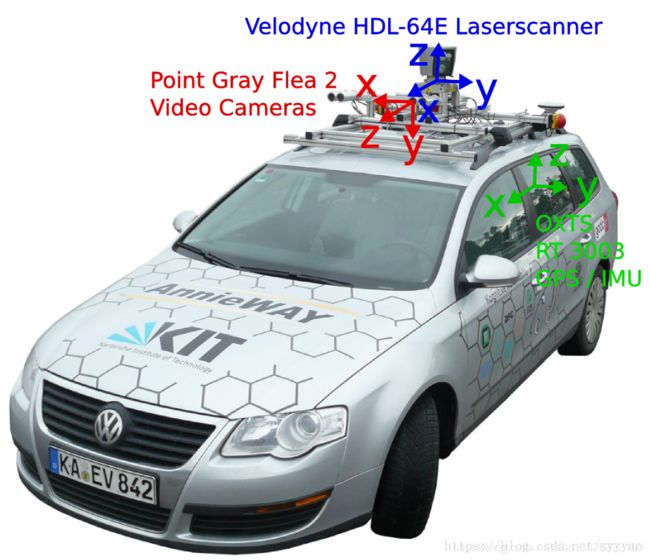
二. 数据采集平台
KITTI数据采集平台包括两个灰度摄像头、两个彩色摄像头和一个Velodyne 3D激光雷达,4个光学镜头,以及1个GPS导航系统。
传感器: 惯性导航系统(GPS / IMU):OXTS RT 3003 一台激光雷达:Velodyne HDL-64E 2台灰度相机,1.4百万像素:Point Grey Flea 2(FL2-14S3M-C) 两个彩色摄像头,1.4百万像素:Point Grey Flea 2(FL2-14S3C-C) 4-8mm的变焦镜头:Edmund Optics NT59-917
三. 数据集文件夹分布
注:velodyne_reduced视椎体的数据(训练使用)是图像在三维空间 └── KITTI_DATASET_ROOT ├── training <-- 7481 train data | ├── image_2 <-- for visualization | ├── calib <-- camera inner and outter parameters | ├── label_2 <--label for trainning and evaluate | ├── velodyne<--lidar data | └── velodyne_reduced <-- empty directory,reduced by image size frustum └── testing <-- 7518test data ├── image_2 <-- for visualization ├── calib ├── velodyne └── velodyne_reduced <-- empty directory 四. 关于kitti数据label标签(共15个数)
Truck 0.00 0 -1.57 599.41 156.40 629.75 189.25 2.85 2.63 12.34 0.47 1.49 69.44 -1.56 Car 0.00 0 1.85 387.63 181.54 423.81 203.12 1.67 1.87 3.69 -16.53 2.39 58.49 1.57 Cyclist 0.00 3 -1.65 676.60 163.95 688.98 193.93 1.86 0.60 2.02 4.59 1.32 45.84 -1.55 DontCare -1 -1 -10 503.89 169.71 590.61 190.13 -1 -1 -1 -1000 -1000 -1000 -10 DontCare -1 -1 -10 511.35 174.96 527.81 187.45 -1 -1 -1 -1000 -1000 -1000 -10 DontCare -1 -1 -10 532.37 176.35 542.68 185.27 -1 -1 -1 -1000 -1000 -1000 -10 DontCare -1 -1 -10 559.62 175.83 575.40 183.15 -1 -1 -1 -1000 -1000 -1000 -10
- 第一个字符串:代表物体别
'Car', 'Van', 'Truck','Pedestrian', 'Person_sitting', 'Cyclist','Tram', 'Misc' or 'DontCare'- 注意:
’DontCare’标签表示该区域没有被标注,比如由于目标物体距离激光雷达太远。为了防止在评估过程中(主要是计算precision),将本来是目标物体但是因为某些原因而没有标注的区域统计为假阳性(false positives),评估脚本会自动忽略’DontCare’ 区域的预测结果。- 第2个数: 代表物体是否被截断从0(非截断)到1(截断)浮动,其中truncated指离开图像边界的对象。
- 第3个数: 代表物体是否被遮挡整数0,1,2,3表示被遮挡的程度,其中0:完全可见 1:小部分遮挡 2:大部分遮挡 3:完全遮挡(unknown)。
- 第4个数: alpha,物体的观察角度,相机中心和物体中心的连线的垂线与物体方向的夹角,范围:-pi~pi。是在相机坐标系下,以相机原点为中心,相机原点到物体中心的连线为半径,将物体绕相机y轴旋转至相机z轴,此时物体方向与相机x轴的夹角
r_y + pi/2 -theta = alpha +pi/2(即图中紫色的角是相等的),所以alpha = r_y - theta
- 第5~8这4个数: 物体的2维边界框
xmin,ymin,xmax,ymax。- 第9~11这3个数: 3维物体的尺寸高、宽、长(单位:米)。
- 第12~14这3个数: 3维物体的位置
x,y,z(在照相机坐标系下,单位:米)- 第15个数: 3维物体的空间方向:
rotation_y(应该就是上面的r_y),在照相机坐标系下,物体的全局方向角(物体前进方向与相机坐标系x轴的夹角),范围:-pi~pi。- 第16个数: 检测的置信度(对训练之前的数据无用,only for result)。


