【惯性导航姿态仪】02 磁传感器的简易标定说明
时间:2023-10-16 01:37:00
【惯性导航姿态仪】02 磁传感器的简单校准说明
-
- 磁传感器的简单校准说明
-
- 为什么要校准磁传感器?
- 2、标定公式
- 3、标定过程
磁传感器的简单校准说明
本说明适用于所有磁传感器的简单校准。
为什么要校准磁传感器?
- 一种测量传感器物理量的手段,它必须能够真正反应测量 大小或矢量方向。
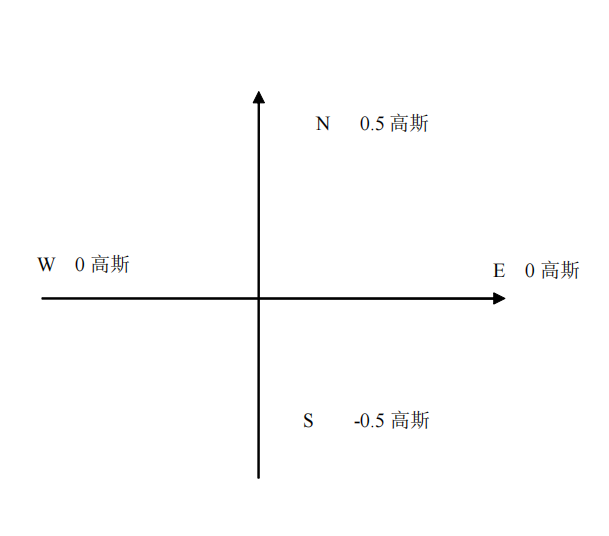
地球的磁在 0.5-0.6 在高斯之间,北向最大,东西向 南向为负值最大。
显然,磁传感器测量的数据大多与实际情况不一致,需要校准。
2、标定公式
- N 0.5 高斯
- S -0.5 高斯
- W 0 高斯
- E 0 高斯
磁和传感器输出是线性的 ,公式如下
y = kx b
- Y-传感器输出;
- X—实际输入,地球磁;
- B—零位;
- K—标度因数,又称灵敏度。
我们要标注的是 k 和 b。
因此,传感器测得的实际地球磁量是
x = ( y ? b) / k
3、标定过程
假设磁传感器的坐标是
最好不要在程序中更改传感器定义为正。
以 X 轴为例
X 轴分别指向东、西、南、北四个方向,传感器本身输出为
可以求得,
,地球高斯取 0.55(这可以根据当地实际磁分量来代替)


