STM32硬件I2C与软件模拟I2C超详解
时间:2023-09-07 17:37:00
目录
- 一.I2C协议简介
- 二.I2C物理层
- 三.I2C协议层
-
- I2C 基本读写过程
- 1.空闲状态
- 2.起始信号和停止信号
- 3.数据有效性
- 4.地址和数据方向
- 5.应答和非应答信号
- 四.硬件I2C
-
- I2C外设功能框图(重点)
- 1.通信引脚
- 2.时钟控制逻辑
- 3.数据控制逻辑
- 4.整体控制逻辑
- 5.STM32的I2C外设通信过程(超级重要)
-
- 主发送器
- 主接收器
- 6.I2C结构体的初始化
- 五.EEPROM简介
-
- 1.STM32向从机EEPROM写字节
- 2.STM32向从机EEPROM多字节(页写入)
- 3.STM32随机读取EEPROM内部任何地址的数据
- 4.STM32随机顺序读取EEPROM内部任何地址的数据
- 六.硬件I2C读写EEPROM实验
-
- 实验目的
- 实验原理
- 源码
- 实验效果
- 七.软件模式I2C协议
-
- 实验目的
- 实验原理
- 源码
- 八.总结
一.I2C协议简介
I2C 通讯协议(Inter-Integrated Circuit)是由 Phiilps 由于引脚少,硬件实现简单,可扩展性强 USART、CAN 外部收发设备(电平转换芯片)等通信协议,目前广泛应用于系统中的多个集成电路(IC)间的通讯。
I2C只跟随数据总线 SDA(Serial Data Line),串行数据总线只能一个一个地发送数据,属于串行通信半双工通信
- 半双工通信:可实现双向通信,但不能同时在两个方向进行,必须轮流交替进行。事实上,它也可以理解为一种可以切换方向的单工通信。同时,它只能在一个方向传输,只需要一条数据线.
对于I2C通信协议将其分为物理层和协议层。物理层规定通信系统中机电功能部分(硬件部分)的特点,以确保物理媒体中原始数据的传输。协议层主要规定通信逻辑,统一收发双方的数据包装和解包标准(软件层面)。
二.I2C物理层
I2C 通信设备之间常用的连接方式
(1) 它是支持设备的总线。总线是指多个设备共用的信号线。 I2C 多个通信总线可以连接到通信总线 I2C 支持多个通信主机和多个通信从机的通信设备。
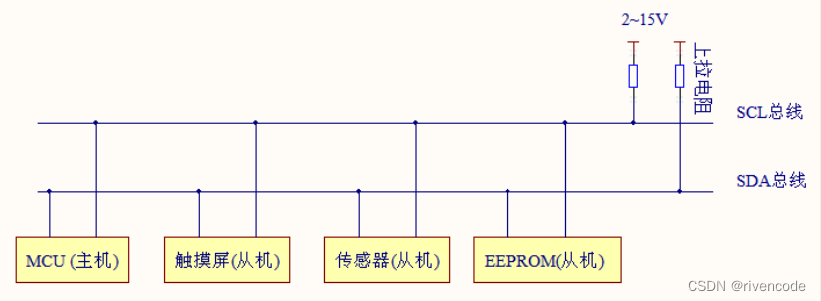
(2) 一个 I2C 总线只使用两条总线,一条双向串行数据线SDA(Serial Data Line ),串行时钟线SCL(Serial Data Line )。数据线用于表示数据,时钟线用于数据收发同步
(3) 当总线通过上拉电阻接收电源时。 I2C 设备空闲时输出高阻态,当所有设备都是空的时候,都是空的当输出高电阻时,上拉电阻将总线拉到高电平。
什么是普通泄漏输出详情请参考–》GPIO八种端口工作模式
开漏输出PMOS不工作
1.当输出寄存器输出高电平时,引脚输出高电阻(开路),假设接引脚I2C的SDA在总线上,总线被默认拉成高电平。
2.输出寄存器输出低电平时,引脚输出低电平。
复用功能泄漏输出
在复用功能模式下,输出使能,输出速度可配置,可在泄漏模式下工作, 但是来自其他外设的输出信号I2C外设),输出数据寄存器 GPIOx_ODR 无效;入,可通过输入数据寄存器获得 I/O 实际状态,然而,数据信号通常直接通过外设寄存器获取
这里SMT32,I2C两个的两个引脚SDA,SCL输出信号来源于复用功能的泄漏输出模式。I2C外设。
引脚为什么要设置开漏模式?
以及为什么两条总线要上拉电阻接高电平,默认情况下总线是高电平。详见下图。
为什么要在设备空闲时间设备?SDA与SCL引脚输出高阻(相当于断开和断开)SDA与SCL连接总线的根本目的是不干扰其他通信设备。
(4) 当多个主机同时使用总线时,为了防止数据冲突,仲裁决定哪个设备占用总线,即在发送数据之前检测设备I2C总线是否忙碌(忙碌的总线应该是低电平)。
(5)I2C 传输方式有三种:标准模式传输速率为 100kbit/s ,快速模式为 400kbit/s ,高速模式下可达 3.4Mbit/s,但目前大多 I2C 该设备不支持高速模式。
每个连接到总线的设备都有一个独立的地址,主机可以使用该地址访问不同设备之间的地址。地址也是一个数据,主机可以同时访问SDA如果发送此地址,挂载在总线上的设备将自行匹配。匹配成功后,您可以相互通信
三.I2C协议层
STM32可以用作主机或从机。我主要介绍一下STM32如何读写数据作为主机。
I2C规定通信时钟、起始信号和停止信号只能由主机产生
下面以STM32做为主机,EEPROM以存储器为例
I2C 基本读写过程
- 1.从机器到主机写数据
当最后一个字节在这里发送时,主机不需要接收从机发送的非响应信号来发送停止信号。即使主机从机上响应,也可以直接发送停止信终止通信
其中 S 由主机表示 I2C 传输接口产生的起始信号(S),这时连接到 I2C 总线上的所有从机器都会接收到这个信号。起始信号生成后,所有从机器开始等待主机 广播(由SDA线传输数据)
从机地址(SLAVE_ADDRESS)。在 I2C 总线上,每个设备的地址都是唯一的,当主机广播的地址与设备地址相同时,选择该设备,未选择的设备将忽略后续数据信号(引脚输出高阻与两条总线断开连接)。
根据 I2C 协议,这个从机地址可以是 7 位或 10 位,从机器接收匹配地址后,主机或从机会返回响应(ACK)或非应答(NACK)只有在接收到响应信号后,主机才能继续发送或接收数据。
地址位置后,是传输方向的选择,表示数据传输方向后面
该位为 0 时:主机向从机写数据。
该位为 1 时间:主机从机读取数据。
- 2.主机从机读取数据
记住,数据接收方要产生响应信号(代表我需要数据)或非响应信号(我不需要数据),不一定是主机或从机产生的。
- 3.读和写数据混合格式
第一次通信是确定读写从机设备内寄存器或存储器的地址,第二次是读或写上次确定内部寄存器或存储器地址上的数据。
1.空闲状态
I2C总线SDA和SCL两条信号线同时处于高电时,则为总线空闲状态,所有挂载在总线上的设备都输出高阻态(相当于断开与总线的连接),两条总线被上拉电阻的把电平拉高。
2.起始信号与停止信号
起始信号:当SCL 线在高电平期间 SDA 线从高电平向低电平切换。
停止信号:当SCL线在高电平期间 SDA 线由低电平向高电平切换。
注意:
起始信号和停止信号是在SCL 是高电平期间,SDA线电平切换的过程,而不是单纯的高低电平。
起始和停止信号只能由主机产生。
3.数据有效性
SDA数据线在 SCL 的每个时钟周期(时钟脉冲)传输一位数据。
-
SCL为高电平期间:SDA 表示的数据有效,此时SDA的电平要稳定,SDA 为高电平时表示数据“1”,为低电平时表示数据“0”。
-
SCL为低电平期间:SDA 的数据无效,一般在这个时候 SDA 进行
电平切换,为下一次表示数据做好准备。
数据和地址按8位/字节进行传输,先传输数据的高位,每次传输的字节数不受限制。
4.地址及数据方向
I2C 总线上的每个设备都有自己的独立地址,主机发起通讯时,通过 SDA 信号线发送设备地址(SLAVE_ADDRESS)来查找从机。I2C 协议规定设备地址可以是 7 位或 10 位,实际中 7 位的地址应用比较广泛。紧跟设备地址的一个数据位用来表示数据传输方向,第 8 位或第 11 位。
- 数据方向位为“1”:表示主机由从机读数据
- 数据方向位为“0”:表示主机向从机写数据
读数据方向时,主机会释放对 SDA 信号线的控制,由从机控制 SDA 信号线(向主机发送数据),主机接收信号,写数据方向时,SDA 由主机控制(向从机发送数据),从机接收信号。
5.应答与非应答信号
I2C 的数据和地址传输都带响应。响应包括“应答(ACK)”和“非应答(NACK)”两种信号。作为数据接收端时,当数据接收端(无论主从机)接收到 I2C 传输的一个字节数据或地址后,若希望对方继续发送数据,则需要向对方发送“应答(ACK)”信号,发送方会继续发送下一个数据;若接收端希望结束数据传输,则向对方发送“非应答(NACK)”信号,发送方接收到该信号后会产生一个停止信号,结束信号传输。
在一个字节传输的8个时钟后的第9个时钟期间,接收器必须回送一个应答位(ACK)或者是非应答位(NACK)给发送器。
在第 9 个时钟时,数据发送端会释放 SDA 的控制权,由数据接收端控制 SDA,给发送端传输应答或非应答信号
-
SDA 为高电平:表示非应答信号(NACK)
-
SDA为低电平:表示应答信号(ACK)
为什么数据发送端要释放 SDA 的控制权(将SDA总线置为高电平)
四.硬件I2C
在讲硬件I2C之前不得不吐槽一下这个硬件I2C外设,有时候就突然会卡在某个事件的检测,需要关闭电源重新启动才有用,不过虽然可能硬件I2C可能会有问题,可能以后不一定用的到但是我们主要是学习如何用硬件实现I2C协议,对我们以后学别的协议肯定会有帮助。
-
硬件 I2C:是指直接
利用 STM32 芯片中的硬件 I2C 外设,该硬件 I2C 外设跟 USART串口外设类似,只要配置好对应的寄存器,外设就会产生标准串口协议的时序。使用它的I2C 外设则可以方便地通过外设寄存器来控制硬件I2C外设产生 I2C 协议方式的通讯,而不需要内核直接控制引脚的电平。 -
软件模拟I2C:即直接使用CPU内核按照 I2C 协议的要求控制GPIO输出高低电平。如控制产生 I2C 的起始信号时,先控制作为 SCL 线的 GPIO 引脚输出高电平,然后控制作为 SDA 线的GPIO引脚在此期间完成由高电平至低电平的切换,最后再控制SCL 线切换为低电平,这样就输出了一个标准的 I2C 起始信号。
硬件 I2C 直接使用外设来控制引脚,可以减轻 CPU 的负担。不过使用硬件I2C 时必须使用某些固定的引脚作为 SCL 和 SDA,软件模拟 I2C 则可以使用任意 GPIO 引脚,相对比较灵活。
I2C外设功能框图(重点)
1.通信引脚
STM32中有两个I2C外设,硬件I2C必须要使用这些引脚,因为这些引脚才连接到I2C引脚,就比如说PB6与PB7引脚就连接到芯片内部的I2C1外设。
就拿正点原子的STM32mini版为例,主机(stm32)使用PB6,PB7作为SCL与SDA引脚,但是PB6,PB7并没有连接到我们要通信的EEPROM的SCL,SDA引脚组成I2C总线,而是PC12与PC11连接到了EEPROM的SCL,SDA引脚,所以我们要把PB6与PB7引脚用杜邦线连接到PC12与PC11,这样就间接将PB6,PB7连接到EEPROM的SCL,SDA引脚上,组成I2C总线。
这一步十分重要,如果你用的I2C1外设与EEPROM通信而没有把PB6,PB7连接到EEPROM的SCL,SDA引脚上不然你代码写出花来都没有用。
原理图:
实物图:
2.时钟控制逻辑
时钟控制寄存器
这里解释一下为什么是用Tpclk1,因为I2C1外设是挂载在APB1总线上的
这里只是演示一下这么计算寄存器写入的值,用库函数我们只要配置好相应寄存器的参数,库函数会帮我计算自动写入的,不要慌。
3.数据控制逻辑
-
当向外发送数据的时候,数据移位寄存器以“数据寄存器”为数据源,把数据一位一位地通过SDA信号线发送出去;
-
当从外部接收数据的时候,数据移位寄存器把SDA信号线采样到的数据一位一位地存储到“数据寄存器”中。
然后通过CPU或DMA向数据寄存器写入或者读出数据(一般保存在一个数组当中)。
数据寄存器DR
自身地址寄存器1
4.整体控制逻辑
这里挑一些重点的寄存器位,我们只需配置好寄存器就可以让I2C外设硬件逻辑自动控制SDA,SCL总线去产生I2C协议的时序如:起始信号、应答信号、停止信号等等
接下来就是了解的知识:
- 总线错误(BERR)
在一个地址或数据字节传输期间,当I2C接口检测到一个外部的停止或起始条件则产生总线错误。此时:
● BERR位被置位为’1’;如果设置了ITERREN位,则产生一个中断;
● 在从模式情况下,数据被丢弃,硬件释放总线:
─ 如果是错误的开始条件,从设备认为是一个重启动,并等待地址或停止条件。
─ 如果是错误的停止条件,从设备按正常的停止条件操作,同时硬件释放总线。
● 在主模式情况下,硬件不释放总线,同时不影响当前的传输状态。此时由软件决定是否要中止当前的传输
主机模式与从机模式
- 应答错误(AF)
当STM32检测到一个无应答位时,产生应答错误。此时:
● AF位被置位,如果设置了ITERREN位,则产生一个中断;
● 当发送器接收到一个NACK时,必须复位通讯:
─ 如果是处于从模式,硬件释放总线。
─ 如果是处于主模式,软件必须生成一个停止条件。
- 过载/欠载错误(OVR)
在从模式下,如果禁止时钟延长,I2C接口正在接收数据时,当它已经接收到一个字节(RxNE=1),但在DR寄存器中前一个字节数据还没有被读出,则发生过载错误。此时:
● 最后接收的数据被丢弃;
● 在过载错误时,软件应清除RxNE位,发送器应该重新发送最后一次发送的字节。
在从模式下,如果禁止时钟延长,I2C接口正在发送数据时,在下一个字节的时钟到达之前,新的数据还未写入DR寄存器(TxE=1),则发生欠载错误。此时:
● 在DR寄存器中的前一个字节将被重复发出;
● 用户应该确定在发生欠载错时,接收端应丢弃重复接收到的数据。发送端应按I2C总线标准在规定的时间更新DR寄存器。
在发送第一个字节时,必须在清除ADDR之后并且第一个SCL上升沿之前写入DR寄存器;如果不能做到这点,则接收方应该丢弃第一个数据
STM32做为从机时写入数据和读出数据时应该连续,取个例子主机要10个字节的数据而你只发5个字节此时就发生欠载错误:在下一个字节的时钟到达之前,新的数据还未写入DR寄存器
5.STM32的I2C外设通信过程(超级重要)
I2C模式选择:
接口可以下述4种模式中的一种运行:
● 从发送器模式
● 从接收器模式
● 主发送器模式
● 主接收器模式
该模块默认地工作于从模式。接口在生成起始条件后自动地从从模式切换到主模式;当仲裁丢失或产生停止信号时,则从主模式切换到从模式。允许多主机功能。
- 主模式:STM32作为主机通信(发送器与接收器)
- 从模式:STM32作为从机通信(发送器与接收器)
这里我主要将STM32做为主机通信
I2C主模式:
默认情况下,I2C接口总是工作在从模式。从从模式切换到主模式,需要产生一个起始条件。
在主模式时,I2C接口启动数据传输并产生时钟信号。串行数据传输总是以起始条件开始并以停止条件结束。当通过START位在总线上产生了起始条件,设备就进入了主模式。
主发送器
- EV5事件
起始条件当BUSY=0时,设置START=1,I2C接口将产生一个开始条件并切换至主模式(M/SL位置位)
一旦发出开始条件,我们需要检测SB是否置1,判断是否成功发送起始信号
● SB位被硬件置位,如果设置了ITEVFEN位,则会产生一个中断。
然后主设备等待读SR1寄存器,紧跟着将从地址写入DR寄存器
- EV6事件
从机地址的发送
● 在7位地址模式时,只需送出一个地址字节。
一旦该地址字节被送出,
─ ADDR位被硬件置位,如果设置了ITEVFEN位,则产生一个中断。
随后主设备等待一次读SR1寄存器,跟着读SR2寄存器。
根据送出从地址的最低位,主设备决定进入发送器模式还是进入接收器模式
● 在7位地址模式时,
─ 要进入发送器模式,主设备发送从地址时置最低位为’0’。
─ 要进入接收器模式,主设备发送从地址时置最低位为’1’
从机地址发送完成从机应答之后检测EV6事件:
确保从机应答,之后才传输下一个数据,如果你不检测万一地址发送失败或者从机无应答,直接就开始传输数据那传给谁??
-
EV8_1事件:
这个检测是地址发送完之后进行检测,其实我们只要检测EV6事件就可以了,因为EV6事件成功之后就已经代表地址(数据)发送出去,而且从机还应答了,地址已经发送完成那肯定数据寄存器,与移位寄存器肯定为空呐,所以不检测也可以。 -
EV8事件
我们在发送完一个数据之后必须判断数据寄存器是否为空,数据寄存器为空(TXE),才能向数据寄存器写入新的数据,不然上一个数据们还没有转移到移位寄存器,CPU又写入一个数据则会覆盖上一个数据。
-
EV8_2事件
在我们发送完最后一个字节之后我们应该检测EV8_2事件,主要检测BTF位。
为什么呢,主要是检测数据移位寄存器的数据全部发送完成,则才算最后一个字节全部发送完毕。 -
关闭通信
在DR寄存器中写入最后一个字节后,通过设置STOP位产生一个停止条件,然后I2C接口将自动回到从模式(M/S位清除)。
主接收器
因为虽然STM32做为接收器,但是STM32是主机,起始信号与发送从机地址都是必须由主机干的活,所以前面EV5,EV6,EV6_1事件与主接收器是一模一样
- EV7事件
主机使能ACK位就可以自动接收完数据产生应答信号。
接收数据之前,判断数据寄存器是否有数据,也就数据寄存器非空(RNXE),CPU就可以读取数据寄存器中的数据啦。
- EV7_1事件
关闭通信
主设备在从设备接收到最后一个字节后发送一个NACK。接收到NACK后,从设备释放对SCL和SDA线的控制;主设备就可以发送一个停止/重起始条件。
● 为了在收到最后一个字节后产生一个NACK脉冲,在读倒数第二个数据字节之后(在倒数第二个RxNE事件之后)必须清除ACK位。
● 为了产生一个停止/重起始条件,软件必须在读倒数第二个数据字节之后(在倒数第二个RxNE事件之后)设置STOP/START位。
● 只接收一个字节时,刚好在EV6之后(EV6_1时,清除ADDR之后)要关闭应答和停止条件的产生位。在产生了停止条件后,I2C接口自动回到从模式(M/SL位被清除)
这里产生一个NACK其实就是清除ACK位,将ACK位置0,后面接收的一个字节不在产生应答就是非应答咯
然后主机产生停止信号
然后通过判断EV7事件,CPU向数据寄存器读取最后一个字节数据
硬件I2C写代码必须熟练掌握和理解主发送器和主接收器的过程,只要你理解了写代码还不是信手拈来,简简单单,然后写代码你会发送就是上面的过程一模一样
6.I2C初始化结构体
- I2C_ClockSpeed
设置I2C的传输速率,我们写入的这个参数值不得高于400KHz。
在调用初始化函数时,函数会根据我们输入的数值,以及后面输入的占空比参数,经过运算后把时钟因子写入到I2C的时钟控制寄存器CCR。
CCR寄存器不能写入小数类型的时钟因子,影响到SCL的实际频率可能会低于本成员设置的参数值,这时除了通讯稍慢一点以外,不会对I2C的标准通讯造成其它影响。
初始化函数
- I2C_Mode
选择I2C的使用方式,有I2C模式(I2C_Mode_I2C )和SMBus主、从模式(I2C_Mode_SMBusHost、 I2C_Mode_SMBusDevice ) 。
- I2C_DutyCycle
设置I 2 C的SCL线时钟的占空比。该配置有两个选择,分别为低电平时间比高电平时间为2:1 ( I2C_DutyCycle_2)和16:9(I2C_DutyCycle_16_9)。
这个模式随便选反正区别不大。
- I2C_OwnAddress1
配置STM32的I2C设备自己的地址,每个连接到I2C总线上的设备都要有一个自己的地址,作为主机也不例外。
地址可设置为7位或10位,只要该地址是I2C总线上唯一的即可。
其实可以有两个地址,这里是设置的第一个地址。
第二个地址要另外用库函数设置而且只能是7位
- I2C_Ack_Enable
配置I 2 C应答是否使能,设置为使能则可以发送响应信号。一般配置为允许应答(I2C_Ack_Enable)若STM32接收一个字节数据自动产生应答,必须要使能
- I2C_AcknowledgeAddress
选择I2C的寻址模式是7位还是10位地址。这需要根据实际连接到I2C总线上设备的地址进行选择,这个成员的配置也影响到I2C_OwnAddress1成员,只有这里设置成10位模式时,I2C_OwnAddress1才支持10位地址。
配置完成之后调用一下I2C初始化函数就搞定
记得使能I2C外设
五.EEPROM简介
EEPROM全称: electrically-erasable, and programmable read-only memory --》可电擦除的可编程的只读存储器,这里的只读并不是只能读,是以前ROM不能写只能读,现在的EEPROM已经是可读写的啦,为什么还叫可读:只不过是保留下来的名字而已。
原理图:
WP引脚直接
EEPROM的设备地址(作为从机)
EEPROM中硬件I2C
EEPROM通信的时候也遵循I2C协议,向产生起始信号,停止信号,应答什么的都一样的。
1.STM32向从机EEPROM写入一个字节
2.STM32向从机EEPROM写入多个字节(页写入)
写入的8个字节是连续的地址,不连续的话不能使用页写入
总结:
- 进行页写入时,写入的存储器地址要对齐到8,也就是说只能写入地址为 0 8 16 32… 能整除8
- 页写如只能一次写入8个字节
规定就是规定我也没有办法,不然就会出错
- 确认EEPROM是否写入完成:
这段话什么意思呢:EEPROM做为我们的非易失存储器(掉电不会丢失数据),相当于我们电脑中的硬盘,它的读写速度是非常慢的,所以STM32把数据发送过去之后,必须等待EEPROM去把数据写入自己内部的存储器才能写入下一波数据(可以是单字节写入也可以是页写入),如果不等待EEPROM把上一次的数据写完又去写入EEPROM是不会搭理你的,也就是说EEPROM处于忙碌状态。
检测EEPROM数据是否写入完成:
用STM32主机不断向EEPROM发送起始信号,然后发送EEPROM的设备的地址等待EEPROM的应答信号,如果不应答,重复在来一遍,直到EEPROM应答则代表EEPROM上一次的数据写入完成,然后才可以传输下一次的数据!!!
3.STM32随机读取EEPROM内部任何地址的数据
4.STM32随机顺序读取EEPROM内部任何地址的数据
EEPROM一共有256个字节对应的地址为(0~255)
当读取到最后一个字节,也就是255地址,第256个字节,在读取又会从头(第一个字节数据)开始读取。
六.硬件I2C读写EEPROM实验
实验目的
STM32作为主机向从机EEPROM存储器写入256个字节的数据
STM32作为主机向从机EEPROM存储器读取写入的256个字节的数据
读写成功亮绿灯,读写失败亮红灯
实验原理
- 硬件设计
原理图
实物图
编程要点
(1) 配置通讯使用的目标引脚为开漏模式;
(2) 编写模拟 I2C 时序的控制函数;
(3) 编写基本 I2C 按字节收发的函数;
(4) 编写读写 EEPROM 存储内容的函数;
(5) 编写测试程序,对读写数据进行校验。
两个引脚PB6,PB7都要配置成复用的开漏输出
这里有一个注意的点,你配置成输出模式,并不会影响引脚的输入功能
详情请看——>GPIO端口的八种工作模式
源码
i2c_ee.h
前面理论已经讲得已经很详细了,直接上代码叭!!
#ifndef __IIC_EE_H
#define __IIC_EE_H
#include "stm32f10x.h"
#include i2c_ee.c
#include "i2c_ee.h"
//设置等待时间
static __IO uint32_t I2CTimeout = I2CT_LONG_TIMEOUT;
//等待超时,打印错误信息
static uint32_t I2C_TIMEOUT_UserCallback(uint8_t errorCode);
void I2C_EE_Config(void)
{
GPIO_InitTypeDef GPIO_InitStuctrue;
I2C_InitTypeDef I2C_InitStuctrue;
//开启GPIO外设时钟
EEPROM_I2C_GPIO_APBxClkCmd(EEPROM_I2C_SCL_GPIO_CLK|EEPROM_I2C_SDA_GPIO_CLK,ENABLE);
//开启IIC外设时钟
EEPROM_I2C_APBxClkCmd(EEPROM_I2C_CLK,ENABLE);
//SCL引脚-复用开漏输出
GPIO_InitStuctrue.GPIO_Mode=GPIO_Mode_AF_OD;
GPIO_InitStuctrue.GPIO_Pin=EEPROM_I2C_SCL_GPIO_PIN;
GPIO_InitStuctrue.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(EEPROM_I2C_SCL_GPIO_PORT,&GPIO_InitStuctrue);
//SDA引脚-复用开漏输出
GPIO_InitStuctrue.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStuctrue.GPIO_Pin = EEPROM_I2C_SDA_GPIO_PIN;
GPIO_InitStuctrue.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(EEPROM_I2C_SDA_GPIO_PORT,&GPIO_InitStuctrue);
//IIC结构体成员配置
I2C_InitStuctrue.I2C_Ack=I2C_Ack_Enable;
I2C_InitStuctrue.I2C_AcknowledgedAddress=I2C_AcknowledgedAddress_7bit;
I2C_InitStuctrue.I2C_ClockSpeed=EEPROM_I2C_BAUDRATE;
I2C_InitStuctrue.I2C_DutyCycle=I2C_DutyCycle_2;
I2C_InitStuctrue.I2C_Mode=I2C_Mode_I2C;
I2C_InitStuctrue.I2C_OwnAddress1=STM32_I2C_OWN_ADDR;
I2C_Init(EEPROM_I2C,&I2C_InitStuctrue);
I2C_Cmd(EEPROM_I2C,ENABLE);
}
//向EEPROM写入一个字节
void EEPROM_Byte_Write(uint8_t addr,uint8_t data)
{
//发送起始信号
I2C_GenerateSTART(EEPROM_I2C,ENABLE);
//检测EV5事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_MODE_SELECT)==ERROR);
//发送设备写地址
I2C_Send7bitAddress(EEPROM_I2C,EEPROM_I2C_Address,I2C_Direction_Transmitter);
//检测EV6事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)==ERROR);
//发送要操作设备内部的地址
I2C_SendData(EEPROM_I2C,addr);
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTING )==ERROR);
I2C_SendData(EEPROM_I2C,data);
//检测EV8_2事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTED )==ERROR);
//发送停止信号
I2C_GenerateSTOP(EEPROM_I2C,ENABLE);
}
//向EEPROM写入多个字节
uint32_t EEPROM_Page_Write(uint8_t addr,uint8_t *data,uint16_t Num_ByteToWrite)
{
I2CTimeout = I2CT_LONG_TIMEOUT;
//判断IIC总线是否忙碌
while(I2C_GetFlagStatus(EEPROM_I2C, I2C_FLAG_BUSY))
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(1);
}
//重新赋值
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送起始信号
I2C_GenerateSTART(EEPROM_I2C,ENABLE);
//检测EV5事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_MODE_SELECT)==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(2);
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送设备写地址
I2C_Send7bitAddress(EEPROM_I2C,EEPROM_I2C_Address,I2C_Direction_Transmitter);
//检测EV6事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(3);
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送要操作设备内部的地址
I2C_SendData(EEPROM_I2C,addr);
//检测EV8事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTING )==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(4);
}
while(Num_ByteToWrite)
{
I2C_SendData(EEPROM_I2C,*data);
I2CTimeout = I2CT_FLAG_TIMEOUT;
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTING )==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(5);
}
Num_ByteToWrite--;
data++;
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//检测EV8_2事件
while( I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTED )==ERROR)
{
if((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(6);
}
//发送停止信号
I2C_GenerateSTOP(EEPROM_I2C,ENABLE);
return 1;
}
//向EEPROM读取多个字节
uint32_t EEPROM_Read(uint8_t *data,uint8_t addr,ui 

