STM32老人防跌倒报警GSM短信GPS定位设计(程序+原理图+PCB)
时间:2023-07-21 02:37:00
本设计:
基于STM32老人防跌倒报警GSM短信GPS定位设计(程序 原理图 PCB)
原理图:Altium Designer
程序编译器:keil 5
编程语言:C语言
编号C0025
功能描述:
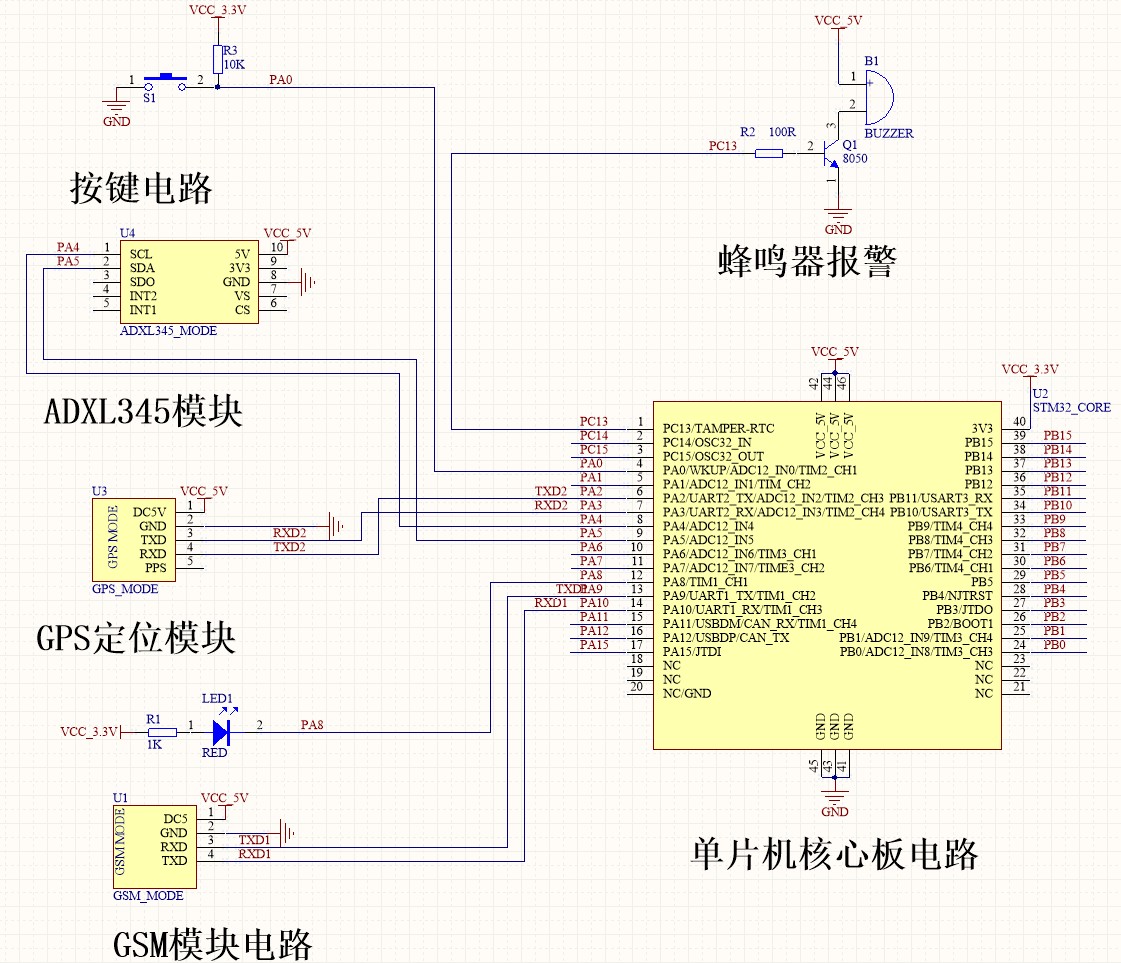
本系统由基于STM32单片机核心板,ADXL345加速度传感器,GSM、GPS模块、指示灯、按键电源 蜂鸣器报警及电源组成。
1.正常情况下,口袋里垂直在口袋里(adxl345模块垂直站在下角),一旦倾角传感器检测到平放,蜂鸣器报警,跌倒时间超过15秒(15秒确定老人跌倒,15秒不起床,需要报警提醒周围人帮忙)。如果老人没有摔倒,而是弯腰等等,这是误报警,老人可以用按钮取消报警。
2、触发GSM模块发送短信, 包括位置经纬度信息在内的设备将向人员发送信息。
3.短信处理和初始化状态指示灯指示。
注:GSM上电初始化需要几秒钟,系统电源至少需要支持5V/2A,GPS天线必须放在漏天位置。
原理图(提供源文件):
PCB(提供源文件):
源程序(提供源文件):
#include "led.h" #include "delay.h" #include "sys.h" #include "timer.h" #include "key.h" #include "usart.h" #include 

