unity3D数学基础-坐标系、向量、矩阵
时间:2023-06-22 13:07:00
坐标系
左右手坐标系
- 左手坐标系:伸开左手,拇指指向X轴,食指指向Y轴,其他三个指向Z轴。
- 右手坐标系:伸开右手,拇指指向X轴,食指指向Y轴,其他三个指向Z轴。
3D笛卡尔坐标系:右手坐标系
OpenGL:右手坐标系
Direct3D:左手坐标系
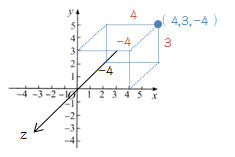
Unity3D:左手坐标系(世界坐标系),即 x, y, z指向右边,上面和前面。
各种坐标空间(坐标系)
部分空间类型
- 模型空间
- unity约定:左手坐标系,XYZ对应右上前。
- 艺术家通常在建模软件中确定模型空间的原点和坐标轴。当导入时unity在顶点着色器中,我们可以访问模型的顶点信息,包括每个顶点的坐标,它们是由模型空间中的原点(通常位于模型的重心)定义的。
- 视图中显示的是localPosition的值。
- transform.localPosition(本地坐标)可获得父物局部坐标系中物体的位置点。
- 世界空间
- unity协议:使用左手坐标系,但它XYZ轴是固定的。
- transform.position获取游戏对象的世界坐标。
- 观察空间
- 右手坐标系符合OpenGL在传统的观察空间中,摄像机的正前方向是指-z轴方向。
- unity约定:相机位于原点, x轴向右, y轴向上分 z轴指向摄像机后面。
- 裁切空间
- 目标是方便地切割渲染元:完全位于空间内的元将被保留,完全位于空间外的元将被删除,与空间边界相交的元将被切割。
- 这个空间由视椎体决定。
- 屏幕空间
- 左手坐标系
- 屏幕的左下角为(0,0),右上角为(Screen.width, Screen.height),z轴坐标是相机世界坐标中z轴坐标的负值。
- 屏幕空间是二维空间。
- 鼠标位置坐标属于屏幕坐标,通过Input.mousePosition位置坐标可以获得。
- 手指触摸屏幕也是屏幕坐标,Input.GetTouch(0).position当单个手指触摸屏幕时,可以获得手指的坐标。
- 视口空间
- 将Game视图屏幕坐标系单位化
- 左下角(0,0),右上角(1,1)。z轴坐标是相机世界坐标中z轴坐标的负值。
相互空间转换
- shader中空间转换
- 模型变换:顶点转换的第一步是将顶点从模型空间转换为世界空间。这种转换通常被称为模型转换。请注意,这里的转换顺序不能交换,即先缩放,然后旋转,最后平移,然后我们可以构建模型转换的转换矩阵(因为矩阵不符合交换定律,所以不要随意更换转换顺序)
- 观察变换:顶点变换的第二步,就是将顶点坐标从世界空间变换到观察空间中,这个变换通常叫做观察变换。一种方法是计算世界空间下观察空间中三个坐标轴的表示,然后构建从世界空间到观察空间的转换矩阵。另一种方法是想象平移整个观察空间,让相机的原点位于世界坐标的原点,坐标轴与世界空间中的坐标轴重叠
- 投影变换:顶点转换的第三步是将顶点坐标从观察空间转换为切割空间(也称为齐次切割空间)。这种转换通常称为投影转换,用于转换的矩阵称为切割矩阵,也称为投影矩阵。
- 目的:首先是为投影做准备。真正的投影发生在后续的齐次除法过程中。投影矩阵变换后,顶点的w重量具有特殊意义;其次是x,y,z重量缩放。
- 视椎体指的是空间中的一块区域,这块区域决定了摄像机可以看到的空间。视椎体由两种类型,这涉及两种投影:一种是正交投影,一种是透视投影。
- 投影:可以理解为空间的维度降低,如从四维空间投影到三维空间,投影矩阵实际上并不是真正的投影,它将为真正的投影做准备。真正的投影将发生在屏幕映射中,并通过齐次除法获得二维坐标。
- 屏幕映射:将顶点从裁剪空间投影到屏幕空间,生成相应的2D坐标。在unity在中间,从切割空间到屏幕空间的转换通常是由底层完成的,我们的顶点着色器只需要将顶点转换为切割空间。最后,通过齐次除法和映射到屏幕上。——分为两个步骤:一是标准齐次除法,又称透视除法。用齐次坐标系的w分量去除x,y,z重量;透视投影和正交投影的视椎体在齐次除法后变成同一立方体。接下来可以根据 变换后的x和y坐标映射输出窗口对应的像素坐标。
- unity中C#相关API
- Transform.forward, Transform.right, Transform.up:目前物体坐标系的z轴,x轴,y轴指向世界坐标系。
- Transform.TransformPoint(Vector3 position) :将坐标点从局部坐标系转换为全局坐标系。
- Transform.InverseTransformPoint(Vector3 position):将坐标点从全局坐标系转换为局部坐标系。
- Transform.TransformDirection(Vector3 direction):将一个方向从局部坐标系转变为全局坐标系。
- Transform.InverseTransformDirection(Vector3 direction):将一个方向从全局坐标系转换到局部坐标系。
- Transform.TransformVector(Vector3 vector):将向量从局部坐标系转换为全局坐标系。
- Transform.InverseTransformVector(Vector3 vector):将向量从全局坐标系转换为局部坐标系。
- Camera.ScreenToWorldPoint(Vector3 position): 将屏幕坐标转换为全局坐标。
- Camera.WorldToScreenPoint(Vector3 position):将全局坐标转换为屏幕坐标。
- Camera.ScreenToViewportPoint(Vector3 position):将屏幕坐标转换为视口坐标。
- Camera.ViewportToScreenPoint(Vector3 position):将视觉坐标转换为屏幕坐标。
- Camera.WorldToViewportPoint(Vector3 position):将全局坐标转换为视口坐标。
- Camera.ViewportToWorldPoint(Vector3 position):将视口坐标转换为全局坐标。
向量
认识向量
- 在数学中,向量(也称为矢量),是指具有大小和方向的量;书写向量时,水平书写的向量叫做行向量
[ 1 2 3 ] \begin{bmatrix} 1 & 2 & 3 \end{bmatrix} [123]
垂直书写的向量叫做列向量。
[ 1 2 3 ] \begin{bmatrix} 1 \\ 2 \\ 3 \end{bmatrix} ⎣⎡123⎦⎤ - 向量的大小就是向量的长度,也叫做模。向量的方向描述了空间中向量的指向;向量中的数表达了向量在每个维度上的有向位移。
- 点中的数表示了一个位置,它没有大小、方向的概念;点只有位置,适量只有方向和大小,任何一个点都可以表示成一个从原点出发的矢量。
向量运算
特殊向量
- 零向量:大小为0,没有方向的向量,并且它不可以被归一化。
- 负向量:向量变负,将得到一个和原向量方向相反、大小相等的向量。
- 单位向量:也叫做标准化向量,就是大小为1的向量;对任意的非零向量,我们都可以计算出它的单位向量,即将其归一化(normalization)。单位向量的表示
a ^ = a ∣ a ∣ \widehat{\bf{a}} =\frac{\bf{a}}{\begin{vmatrix} \bf{a} \end{vmatrix}} a =∣∣a∣∣a - 在Unity中,可以使用Vector3.Normalize来归一化向量。使用Vector3.normalized来获得归一化后的单位向量;Vector3.Normalize改变当前向量,Vector3.normalized当前向量是不改变的并且返回一个新的规范化的向量。
向量的长度
- 即向量的大小,或者向量的模。
- 向量的大小就是向量各分量平方和的平方根
- 在Unity中,可以通过Vector3.magnitude计算向量的长度。Vector3.sqrMagnitude则返回向量长度的平方;Vector3.Distance(A,B)可以计算2个点A,B之间的距离,即返回向量AB或向量BA的长度。
向量与标量的乘/除法
- 向量与标量的乘法,即将向量的每个分量分别与标量相乘。
- 向量与非零标量的除法,即乘以该标量的倒数。
向量的加/减法
- 只有在两个向量的维度相同时,才可以相加或相减。
- 向量的加法和减法,即将向量的各个分量相加或相减。
- 向量的加法满足交换律和结合律,向量的减法仅满足结合律。
- 几何意义:对于加法,我们可以把矢量a的头连接到矢量b的尾,然后画一条从a的尾到b的头的矢量,来得到a和b相加后的矢量。减法类似
- 公式: a ⃗ + b ⃗ = ( a x + b x , a y + b y , a z + b z ) a ⃗ − b ⃗ = ( a x − b x , a y − b y , a z − b z ) \vec{a} + \vec{b}=(a_x+b_x,a_y+b_y,a_z+b_z) \\ \vec{a} - \vec{b}=(a_x-b_x,a_y-b_y,a_z-b_z) a+b=(ax+bx,ay+by,az+bz)a−b=(ax−bx,ay−by,az−bz)
向量的点积
- 也叫做向量的内积。表示如下:其中点不可以省略
a ⃗ ⋅ b ⃗ \vec{a} \cdot \vec{b} a⋅b - 两种计算公式如下:
a ⃗ ⋅ b ⃗ = ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos θ a ⃗ ⋅ b ⃗ = ( a x b x + a y b y + a z b z ) \vec{a} \cdot \vec{b}=\rvert \vec{a} \rvert \rvert \vec{b} \rvert \cos \theta \\ \vec{a} \cdot \vec{b}=(a_xb_x+a_yb_y+a_zb_z) a⋅b=∣a∣∣b∣cosθa⋅b=(axbx+ayby+azbz) - 点积满足交换律。
- 向量点积的结果是一个标量
- 几何意义:
- 点乘结果描述了两个向量的“相似”程度,点乘结果越大,两向量越相近
- 投影:向量b在向量a上的投影的长度可以表示为
∣ b ⃗ → a ⃗ ∣ = ∣ b ⃗ ∣ cos θ = a ⃗ ⋅ b ⃗ ∣ a ⃗ ∣ \begin{vmatrix} \vec{b} \to \vec{a} \end{vmatrix}=\begin{vmatrix} \vec{b} \end{vmatrix} \cos \theta=\frac{\vec{a} \cdot \vec{b}}{\begin{vmatrix} \vec{a} \end{vmatrix}} ∣∣∣b→a∣∣∣=∣∣∣b∣∣∣cosθ=∣∣a∣∣


