单片机L298N电机驱动板的几种不同电压使用场景
时间:2023-06-19 22:37:00
L298N电机驱动版主要由两个核心部件组成
-
L298N 驱动芯片
-
78M05 稳压器
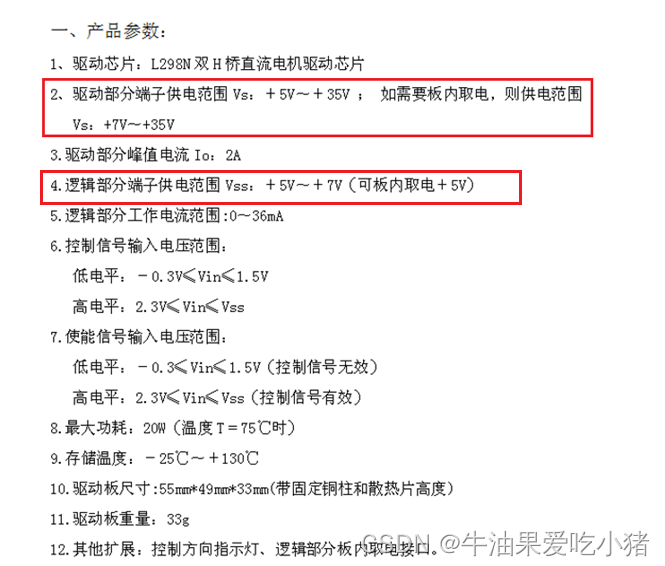
模块参数:
模块端口示意图:
这个板载5V与稳压模块有关的复杂,与稳压模块有关
稳压模块能否生效完全取决于5V能跳帽是否启用(取下禁用,插入启用,默认为板载连接),这里有两种情况,连接和不连接:
板载跳帽:
当电源小于或等于12V时,内部电路由稳压器供电,并且5V引脚作为微控制器供电的输出引脚,即:VCC作为7805的输入,5V它是7805的输出,可以为板载提供5v电压用于外部电路供电
拔掉跳帽:
当电源大于12V时,拔掉跳帽,并且应通过5V端子单独为内部供电,此时5V端为输入。即:VCC不作为7805的输入, 5v由外部电路提供,此时需要两个电源,VCC和 5V
注意事项:
**7V
ps:上次没有用四节干电池驱动,原来电压不够。
**12V 总结U的范围: U<7V:12V端口输入电压用于内部电路,缺点是12V输入电压可能不足,电机转速不足 (这种情况是我自己假设的,U<7V,理论上,内部电路仍由稳压器供电,) 7V 12V 电源引脚 VCC 电压范围为5~35V之间 IN1 & IN2 电机驱动A的输入引脚控制电机A的旋转和旋转角度 IN3 & IN4 电机驱动器B的输入引脚控制电机B的旋转和旋转角度 输出引脚 调速控制引脚 关于电机调速 采用PWM调速,其原理是就是开关管在一个周期内电的导通时间为t,在周期T中,电机两端的平均电压U=Vcc*(t/T)=a Vcc。其中a=t/T,又称占空比,Vcc是电源电压。电机转速与电机两端电压成正比,电机两端电压与控制波形的比例成正比。因此,电机的速度与比例成正比。比例越大,电机转速越快。详见文末:电机驱动原理调速PWM。 参考博文:
GND GND是连接到电源负极的接地引脚
5V 如果安装了5个驱动芯片内部逻辑电源引脚V跳帽,这个引脚可以输出5V如果拔下5个电压,为微控板或其他电路提供电源V跳帽需要独立外接5V电源
控制引脚
IN1输入高电平HIGH,IN2输入低电平LOW,对应电机A正转
IN1输入低电平LOW,IN2输入高电平HIGH,对应电机A反转
IN1、IN同时输入高电平HIGH或低电平LOW,停止转动相应的电机A
调速就是改变IN1、IN2高电平占空比(需要拔掉)ENA处跳帽)
IN3输入高电平HIGH,IN4输入低电平LOW,对应电机B正转
IN3输入低电平LOW,IN4输入高电平HIGH,对应电机B反转
IN3、IN同时输入高电平HIGH或低电平LOW,停止转动相应的电机B
调速就是改变IN3、IN4高电平占空比(需要拔掉)ENB处跳帽)
官方示例源码:
#include
想看更加详细L298N芯片说明,点击这里


