单片机STM8S测量电压电路_单片机设计的胶带输送机智能模糊检测系统,准确性高,胶带寿命长...
时间:2023-04-27 01:37:00
由于施加负载的频繁变化,胶带输送机的实际运行速度和设定运行存在误差,因此打滑检测系统经常发生误报。沈阳工业大学研究人员荆莹、宗明在2020年第七期《电气技术》杂志上撰文,设计了一套节能模糊检测系统,以便更准确、高效地检测胶带输送机的打滑故障。实验结果表明,该系统的设计提高了胶带输送机打滑故障检测的准确性,延长了胶带的使用寿命。
胶带输送机的传动模式属于柔性传动中的带传动,容易打滑。滑动是带式输送机工作中不可避免的问题,滑动故障不仅加速了传送带的磨损,而且影响了生产效率,严重时还会发生火灾等重大事故。因此,胶带输送机的打滑检测尤为关键。速度保护不仅在于设计直接保护装置,还可以通过提高速度测量的准确性,更有效地监测打滑故障。
测速最常用的方法是用转速表测量电机的转速。此方法不直接测量皮带速度,易出现测量误差。王荣杰提出用传感器测量主辊和传动辊的速度,并分析测量结果:如果速度没有差异,则证明带式输送机正常运行;如果差异明显,输送带打滑延迟保护。该方法应用广泛,但分别测量主辊和驱动辊的速度相对复杂。
测量传送带速度的方法更直接、更准确。带式输送机一般采用固定运行速度的运行方式,但输送机在实际应用中会携带重量较大的物品,实际运行速度往往低于设定速度,增加打滑误报的概率。
本文设计了无设定运行速度的胶带输送机,以检测器实际测量的运行速度为标准。鉴于无设定运行速度不知道速度为稳定运行速度,提出了基于模糊推理系统的带式输送机启动过程检测算法,确定启动过程结束时的速度为需要存储的平稳运行速度,然后以平稳运行速度作为检测打滑的标准。该系统达到了高效、准确、高鲁棒性检测打滑的目的。
1 系统组成
该系统主要由单片机组成PIC18F25K80、报警电路、电流输出电路、脉冲输出电路和胶带输送机状态显示电路,框图如图1所示。
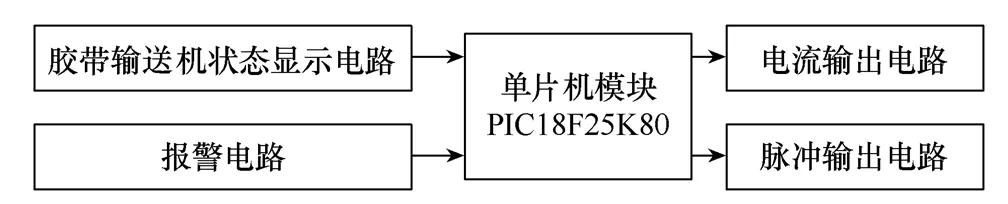
图1 系统框图
PIC18F25K80用于算法的实现是整个系统的主要控制核心。电流输出电路和脉冲输出电路组成速度测量模块:脉冲输出电路适用于带式输送机的近距离运输,电流输出电路适用于带式输送机的远距离运输。当速度过低时,报警电路用于报警和带式输送机状态显示电路用于运行过程状态显示。
2 主硬件设计
2.1 PIC18F25K80单片机系统
采用主控核心部分MICROCHIP公司的PIC18F25K80,如图2所示。这是一款性能优异的8位微控制器,集成有增强型CAN控制模块,能耗极低,工作频率16MHz,3648 Bytes的RAM,1024 Bytes的EEPROM,32KB的Flash,一个ECAN模块。
图2 PIC18F25K80
时钟电路采用内部方式为单片机提供时钟信号,如图3所示。
图3 时钟电路
器件检测到VCC当电压升高时,会产生上电复位脉冲,通过电阻MCLR引脚与电源连接,可节省上电复位所需的外部连接RC元件。
2.2 电源电路
本系统供电220V,通过AC/DC电源模块转换为直流源,为两部分提供电源:第一部分通过DC/DC电源模块(M2596S)得到一个5V使用电压供单片机;第二部分通过隔离DC/DC电源模块(B1224S-1W),将电压降到24V,用于模拟电路(电流输出电路)。
数字电源与模拟电源的地线隔离,不相互干扰。单片机工作时,数字电源中会产生高频纹波干扰,可以有效防止这种干扰传输到模拟电源,如图4所示。
2.3 状态显示电路
状态显示电路用于显示带式输送机的运行状态RB0和RB当胶带输送机启动时,1引脚相连,RB1输出信号,LED1指示灯亮黄灯;启动后正常运行时,RB0输出信号,LED如图5所示,指示灯亮绿灯。
图4 电源电路
图5 状态显示电路
2.4 报警电路
报警电路由PNP晶体管(1815)LED指示灯、继电器和单片机引脚(RC6、RC7)组成。启动过程结束后,存储平稳运行速度。当实时测量速度低于平稳运行速度的85%时,引脚RC6输出一定的频率信号,左侧LED指示灯亮起,通过继电器触发报警信号;当实时速度低于平稳运行速度的70%时,引脚RC7输出一定的频率信号,右侧LED指示灯亮起报警,触发继电器断开电源,如图6所示。
图6 报警电路
2.5 脉冲输出电路
脉冲输出电路为600线增量编码器(JCHA- 500-G12-24C)。编码器是一种增量旋转编码器,其优点是原理结构简单,机械平均寿命可达数万h以上,抗干扰能力强,可靠性高,适用于带式输送机的长途运输。编码器与电机相连,电机转速可通过编码器转换为带式输送机的线速。
由于编码器中的挡板结构,编码器有两种电路,即波形相差90°两路脉冲A相,B使用相电路A、B脉冲相位差可通过不同或门达到1200脉冲/周。该设计不仅提高了测量精度,而且节省了直接使用1200线编码器的成本,完全满足了打滑检测速度的需要。
脉冲信号测量有两个地方:①进入单片机进行打滑检测;②脉冲数可以通过光耦输出脉冲信号获得,从而获得速度,然后将获得的数据作为软件部分。两部分用光耦隔离,不相互干扰。该部分适用于胶带输送机的近距离运输,如图7所示。
图7 脉冲输出电路
2.6 电流输出电路
电流输出模块可以将单片机端口的信号从左侧单向传输到右侧,通过串行外围设备接口连接三个光电耦合,起到隔离作用,解决两侧电源不平等的问题。DAC8551是低功耗、电压输出的16位数模转换器(DAC),线性好。
使用一个通用的3线串行接口,在30MHz在时钟频率下工作,并符合标准SPITM兼容性。该芯片是精密电流输出变送器(XTR提供稳定的电压,XTR116可在整个工业标准电流环内发送4~20mA模拟信号,并提供精确的电流校准和输出电流限制。
由于该模块用于长距离传输速度检测,因此采用了不易干扰的电流信号。工业现场的噪声电压范围可能很大,但噪声功率很小,所以噪声电流通常很小,所以对电流传输的误差很小。电流源的内阻往往无限大,导线电阻串联在电路中不影响精度,因此可以在普通双绞线上传输数百个m。如图8所示。
图8 电流输出电路
3 软件部分设计
模糊推理是模糊推理的关键组成部分,采用模糊逻辑,从给定的输入到输出的映射过程,输入变量模糊集数、每个模糊集对应的隶属函数、模糊推理规则库和去模糊方法。基于现有领域知识和专家经验,通常建立推理规则库IF-THEN形式描述。
3.1 选择模糊语言变量
无设定运行速度胶带输送机鉴于负载的重量差异而导致运行速度存在差异。由于不知道运行速度,启动过程成为一个模糊的概念,难以用准确的分析模型进行分析,用速差判断启动结束是否会有误差,因为带式输送机启动过程的加速曲线是抛物线,启动时的速差接近启动结束时的速差,会有误报,所以考虑引入加速差作为输入变量,用模糊推理算法准确判断启动过程。
输出是启动过程U,并将启动过程分为启动、启动结束和无此情况。根据测量的物理量制定模糊集合,建立输入输出之间的模糊推理规则,然后根据规则计算模糊控制表,并存储在单片机中。
3.2 模糊化
在启动系统中,设置速度差的模糊语言变量为EV,加速度差的模糊语言是EA,启动过程中的模糊语言是U。模糊处理后,模糊语言集成{ZO, PS, PB},速差语言描述为{偏差小, 偏差中, 偏差大}。其偏差范围见表1。
表1 速差范围
加速度差量EA其模糊语言集表示为{NB, NM, ZO, PM, PB},语言表达为{负大, 负小, 零, 正小, 正大}。其差异范围见表2。启动过程U,其模糊语言集为{NZ, NS, NW},对应的语言描述为{启动, 起动结束, 没有这种情况}。
表2 加速度差量范围
3.3 模糊控制规则的确立
模糊控制规则采用经验归纳法来确定。在起动模糊控制中选取相应的控制量的程度,模糊控制规则见表3。这样一组模糊推理规则,能够实现速度差量及加速度差量和起动过程之间的非线性关系,以用于胶带输送起动过程的判断。
表3 模糊控制规则
3.4 系统程序设计
带式输送机的速度范围为0.1~10m/s,测量带速的滚筒直径为112mm。采用600线增量编码器,利用A、B脉冲相位差,通过异或门可达到1200脉冲/周。
系统的软件设计全部使用C语言程序,调试环境为MPLAB IDE。速度的采集用两个中断进行并行处理:第一个中断TMR0每0.2s产生一次中断,每隔0.2s测量一次速度;第二个中断TMR1连接编码器,从固定的时间中断读取一个计数器的值,就可以采集到速度。
下面的过程:①开始主程序,对得到的速度进行速度差和加速度差计算,若计算后的速度为零,则检测为停机;若不为零,则按照宏定义对应模糊控制表的规则判断运行过程;②判断为起动结束后,进入运行过程,并对当前运行速度进行储存;③进入打滑检测部分,当测量速度值达到85%运行速度时进行失速报警,当检测速度达到75%运行速度时进行停机保护。图9所示为主程序流程图。
图9 主程序流程图
4 实验验证
根据上述原理图搭建的胶带输送机实物调试硬件如图10所示,用电机模拟胶带输送机,通过降低胶带输送机的速度模仿打滑的原理。通过设定电流值控制速度,对比速度差检测法和模糊推理检测法,测量50次达到9mA电流对应速度所需的时间,各取测量结果的平均值,并统计两个方法的误报情况。
实测结果表明:使用模糊推理系统的胶带输送机起动过程检测算法,相比使用速度差检测法判断起动过程,检测精度提高,没有再出现误判情况,并且能够更快速检测出起动结束,检测出的运行速度也更准确。这使得胶带输送机可以更准确检测出打滑故障,从而提高生产效率,延长胶带输送机使用寿命。实验数据统计表见表4。
表4 实验数据统计表
图10 胶带输送实物调试硬件
5 结论
本文设计了胶带输送机节能模糊打滑检测系统,详细介绍了检测打滑系统的硬件电路、算法设计和软件实现;并搭建了基于模糊推理的胶带输送机起动过程检测系统,使得负载的大小不再对打滑判断产生影响,在整个系统制作成本较低的情况下,提高了胶带输送机检测打滑故障的准确性,使生产效率得以提高。因而该检测系统具有较高的使用价值。




