智能机器人-(一)常用传感器及其原理
时间:2023-01-17 22:00:00
文章目录
一、常用传感器及其原理
1.位置传感器
(1)电位器
电位器通过电阻将位置信息转换为随位置变化的电压。
示意图和公式如下
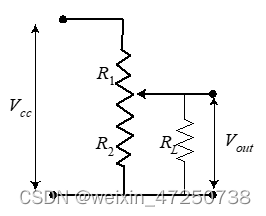
电位器通常用作检测关节和连杆位置的内部反馈传感器。
2.编码器
光源(LED)光束将发送到接收器(光电二极管),光源和接收器安装在旋转连接轴承的静态部分。编码器是安装在轴承旋转部分的带透明窗的遮光盘。
当轴承旋转时,编码器允许光束交替通过(通过小窗户)。光电二极管输出相应的高电平或低电平信号,光电二极管输出可通过专用电路转换为位置和速率信息,实现编码。
(1)增量编码器
相同尺寸的透光和不透光弧段交替出现。
增量编码器就像积分器,只能检测角位置的变化。
增量编码器只能告诉我们移动了多少。
在位置跟踪系统中,必须在系统开始时复位
(2)绝对编码器
绝对编码器的每个位置都对应着透光和不透光弧段的唯一组合,具有独特的特点。
3.传输时间测量(磁反射)型位移传感器
脉冲通过导体发射,当它遇到磁体时,机器人中的位移传感器就是这种类型。根据传输时间计算位置信息。
4.速度传感器
(1)使用测速计
(2)位置信号求微分
位置信号噪声小,微分以求速度信号。
相反,要求速度信号得分的位置信号。
5.力和压力传感器
(1)压电晶体:压电材料在施加一定电压时会收缩,挤压时会产生一定的电压。
(2)力敏电阻:其电阻值随垂直施加在表面的力的增加而降低。
(3)应变片:用于测量力,应变片的输出与其形成正比,形变本身与施加的力成正比。
6.力矩传感器
在轴上安装两个力传感器,并将其放置在相反的表面。如果在轴上施加扭矩,扭矩会在轴上产生两个方向相反的力和两个方向相反的变形。
7.可见光和红外传感器
这些传感器的电阻随着光强的变化而变化。入射光强为零,电阻最大。光强越大,电阻越小,相应流过的电流越大。
当光强超过一定程度时,光敏电阻会导通,否则会断开。
光传感器对光敏感,红外传感器对红外光敏感。红外线可以用来测量长距离导航,不会干扰人们的注意力或影响任何人。
8.接触和触摸传感器
接触传感器:最简单的是微动开关,接触发生时打开或断开。
接触传感器:许多接触传感器的组合可以为接触对象提供更多信息。
9.接近感觉传感器
在接触两个物体之前,检测一个物体靠近另一个物体。
(1)磁感应接触传感器
(2)光学接近感传感器
(3)超声波接近感觉传感器
10.测距仪
(1)超声波测距仪
优点:系统结构坚固、简单、廉价,能耗低
缺点:分辨率和最大工作距离受限,背景噪声过高会影响超声波设备工作。
通过测量传输时间进行测距。
(2)光测距仪
三角法常用
11.嗅觉传感器
12.味觉传感器
13.视觉系统
、


