卡尔曼滤波
时间:2022-12-26 18:00:00
文章目录
- 前言
- 卡尔曼滤波
- 解释
-
- 用矩阵描述问题
- 变量的外部控制
- 外部干扰
- 用测量值修正估计值
- 整合高斯分布
前言
应用于之前的视频目标检测任务DeepSort算法。DeepSort算法是由Sort算法加入“Deep即卷积神经网络进化而来。Sort算法主要有两部分,一部分是卡尔曼滤波器,另一部分是匈牙利距离。卡尔曼滤波器的一个非常生动的例子是如何在火箭升空时测量火焰的温度。由于没有这样的耐热材料,我们不能直接将温度计放在喷火处。但它可以放在外壳中,通过卡尔曼滤波器测量外壳的温度。当然,这只是一个测量火箭发射温度的例子。接下来一起学习卡尔曼滤波。本文主要摘自:什么是卡尔曼滤波?
卡尔曼滤波
卡尔曼滤波器是利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据包括系统中噪声和干扰的影响,最佳估计也可视为滤波过程。数据滤波器是一种数据处理技术,可以去除噪声,恢复真实数据。当测量方差已知时,卡尔曼滤波器可以从一系列测量噪声的数据中估计动态系统的状态。
解释
假设当前以位置和速度的状态做简单例子解释: a ? = [ p v ] \vec{a}=\begin{bmatrix} p \\ v \end{bmatrix} a=[pv]我们不知道实际的位置和速度,它们之间有很多正确的组合,但有些比其他部分更有可能:
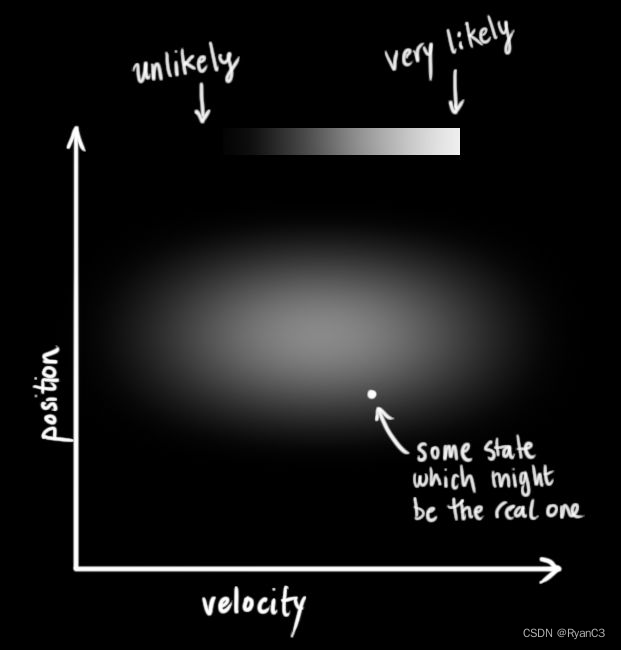
在当前的例子中(如果没有特殊的解释,以下都是这个例子),卡尔曼滤波器假设两个变量是随机的,并服从高斯分布。每个变量都有一个平均值 μ \mu μ,中心表示随机分布和方差 σ 2 \sigma^2 σ2表示不确定性。
在上图中,位置和速度的关系是不相关的,这意味着由其中一个变量的状态无法推测出另一个变量可能的值。下面例子更有趣:位置和速度是相关的,观测特定位置的可能性取决于当前的速度:
这种情况是有可能发生的,例如,基于旧的位置来估计新位置。如果速度过高,物体可能已经移动很远了。如果缓慢移动,则距离不会很远。跟踪这种关系是非常重要的,因为他带给我们更多的信息:其中一个测量值告诉了其它变量可能的值,这就是卡尔曼滤波的目的,尽可能地在包含不确定性的测量数据中提取更多信息。
这种相关性用协方差矩阵来表示,简而言之,矩阵中的每个元素 ∑ i j \sum ij ∑ij表示第 i i i个和第 j j j个状态变量之间的相关度。(你可能已经猜到协方差矩阵是一个对称矩阵,这意味着可以任意交换 i 和 j)。协方差矩阵通常用“ ∑ \sum ∑”来表示,其中的元素则表示为“ ∑ i j \sum ij ∑ij”。
使用矩阵描述问题
基于高斯分布建立状态变量,所以在时刻 k k k需要两个信息,最佳估计 X k X_k Xk,即均值,以及协方差矩阵 P k P_k Pk
需要根据当前状态( k − 1 k-1 k−1时刻)来预测下一状态( k k k时刻)。我们不知道对下一状态的所有预测中哪个是“真实”的,但预测函数并不在乎。它对所有的可能性进行预测,并给出新的高斯分布。
可以用矩阵 F k F_k Fk来表示这个预测过程:
它将我们原始估计中的每个点都移动到了一个新的预测位置,如果原始估计是正确的话,这个新的预测位置就是系统下一步会移动到的位置。下面用一个基本的运动学公式来表示如何用矩阵来预测下一个时刻的位置和速度:
现在,已经可以通过一个预测矩阵来表示下一时刻的状态,但是,仍然不知道怎么更新协方差矩阵。此时,需要引入另一个公式,如果将分布中的每个点都乘以矩阵 A,那么它的协方差矩阵 ∑ \sum ∑会怎样变化呢?很简单,下面给出公式:
结合方程(3)和(4)得到:
外部控制变量
我们并没有捕捉到一切信息,可能存在外部因素会对系统进行控制,带来一些与系统自身状态没有相关性的改变。
以火车的运动状态模型为例,火车司机可能会操纵油门,让火车加速。相同地,在我们机器人这个例子中,导航软件可能会发出一个指令让轮子转向或者停止。如果知道这些额外的信息,我们可以用一个向量 Uk 来表示,将它加到我们的预测方程中做修正。
假设由于油门的设置或控制命令,我们知道了期望的加速度 a a a,根据基本的运动学方程可以得到:
B k B_k Bk称为控制矩阵, U k U_k Uk称为控制向量(对于没有外部控制的简单系统来说,这部分可以忽略)。让我们再思考一下,如果我们的预测并不是100%准确的,该怎么办呢?
外部干扰
如果这些状态量是基于系统自身的属性或者已知的外部控制作用来变化的,则不会出现什么问题。但是,如果存在未知的干扰呢?例如,假设我们跟踪一个四旋翼飞行器,它可能会受到风的干扰,如果我们跟踪一个轮式机器人,轮子可能会打滑,或者路面上的小坡会让它减速。这样的话我们就不能继续对这些状态进行跟踪,如果没有把这些外部干扰考虑在内,我们的预测就会出现偏差。
在每次预测之后,我们可以添加一些新的不确定性来建立这种与“外界”(即我们没有跟踪的干扰)之间的不确定性模型:
原始估计中的每个状态变量更新到新的状态后,仍然服从高斯分布。可以说 X k − 1 X_k-1 Xk−1的每个状态变量移动到了一个新的服从高斯分布的区域,协方差为 Q k Q_k Qk 。换句话说就是,我们将这些没有被跟踪的干扰当作协方差为 Q k Q_k Qk的噪声来处理。
这产生了具有不同协方差(但是具有相同的均值)的新的高斯分布。
通过简单地添加 Qk 得到扩展的协方差,下面给出预测步骤的完整表达式:
由上式可知,新的最优估计是根据上一最优估计预测得到的,并加上已知外部控制量的修正。而新的不确定性由上一不确定性预测得到,并加上外部环境的干扰。
好了,我们对系统可能的动向有了一个模糊的估计,用 X k X_k Xk和 P k P_k Pk来表示。如果再结合传感器的数据会怎样呢?
用测量值来修正估计值
可能会有多个传感器来测量系统当前的状态,哪个传感器具体测量的是哪个状态变量并不重要,也许一个是测量位置,一个是测量速度,每个传感器间接地告诉了我们一些状态信息。
注意,传感器读取的数据的单位和尺度有可能与我们要跟踪的状态的单位和尺度不一样,我们用矩阵Hk 来表示传感器的数据。
可以计算出传感器读数的分布,用之前的表示方法如下式所示:
卡尔曼滤波的一大优点就是能处理传感器噪声,换句话说,我们的传感器或多或少都有点不可靠,并且原始估计中的每个状态可以和一定范围内的传感器读数对应起来。
从测量到的传感器数据中,我们大致能猜到系统当前处于什么状态。但是由于存在不确定性,某些状态可能比我们得到的读数更接近真实状态。
将这种不确定性(例如:传感器噪声)用协方差 R k R_k Rk表示,该分布的均值就是我们读取到的传感器数据,称之为 Z k Z_k Zk 。现在我们有了两个高斯分布,一个是在预测值附近,一个是在传感器读数附近。
必须在预测值(粉红色)和传感器测量值(绿色)之间找到最优解。那么,最有可能的状态是什么呢?对于任何可能的读数 ( z 1 z_1 z1, z 2 z_2 z2) ,有两种情况:(1)传感器的测量值;(2)由前一状态得到的预测值。如果我们想知道这两种情况都可能发生的概率,将这两个高斯分布相乘就可以了。
剩下的就是重叠部分了,这个重叠部分的均值就是两个估计最可能的值,也就是给定的所有信息中的最优估计。这个重叠的区域看起来像另一个高斯分布。
把两个具有不同均值和方差的高斯分布相乘,你会得到一个新的具有独立均值和方差的高斯分布!下面用公式讲解。
融合高斯分布
先以一维高斯分布来分析比较简单点,具有方差 σ 2 \sigma^2 σ2和 μ \mu μ的高斯曲线可以用下式表示:
将式(9)代入到式(10)中(注意重新归一化,使总概率为1)可以得到:
将式(11)中的两个式子相同的部分用 k k k表示:
下面进一步将式(12)和(13)写成矩阵的形式,如果 ∑ \sum ∑表示高斯分布的协方差, μ \mu μ表示每个维度的均值,则:
矩阵 K K K称为卡尔曼增益。将所有公式整合起来,有两个高斯分布,预测部分和测量部分,将它们放到式(15)中算出它们之间的重叠部分:
由式(14)可得卡尔曼增益为:
将式(16)和式(17)的两边同时乘矩阵的逆得到以下等式:
上式给出了完整的更新步骤方程。 X k ′ X_k' Xk′就是新的最优估计,我们可以将它和 P k ′ P_k' Pk′放到下一个预测和更新方程中不断迭代。


