柔性机械臂_Soft robotics:香港大学研发全新柔性驱动方式为仿生机器人设计提供新思路!...
时间:2022-11-20 02:30:00
为了实现安全可靠的人机交互,机器人必须具有一定的灵活性(compliance)。除了使用传感器信息和精确控制来实现刚性减速器电机的灵活性外,我们还可以设计自己的灵活性(self-compliance)气动人工肌肉等驱动器(pneumatic artificialmuscle)。最近,由香港大学陈永华教授领导的研究团队在国际著名机器人期刊《软机器人》上发表(softrobotics)一篇论文提出了一种全新的柔性驱动器,扭转管驱动器(twisting tubeactuation,简称TTA),利用持续扭转充满空气的细长弹性管,同步输出气压和沿着管的收缩力,实现了不受束缚(untethered)多模式流体驱动。该驱动模式具有极低的成本和本体灵活性。更重要的是,该驱动模式可以实现多种变化模式,在柔性机器人和可穿戴设备中具有很大的潜力。
扭转管驱动仿生机器人的概念一种全新的多模式流体驱动:扭转管驱动
随着机器人进入我们的生活,能与人安全互动的机器人技术越来越重要。由电机和减速器控制的机器人(如KUKA我们可以使用柔性机械臂)传感器和控制算法为了实现机器人的灵活性,我们还可以设计新的驱动器它们具有柔性的特点,例如,著名的气动人工肌肉(pneumatic artificialmuscle)(FESTO柔性仿生机械臂),但美中不足气动人工肌肉需要连接到大型气泵来提供足够的气压,因此,它的实用性也受到限制。今天,小编将介绍一种全新的柔性驱动设计方法,不受束缚(untethered)多模式流体驱动-扭转管驱动(twisting tube actuation, 简称TTA),能够在大型气泵的帮助下,也实现了气动人工肌肉的驱动。
柔性机械臂的例子扭转管驱动(TTA)启发生活中常见的力学现象:扭转屈曲(torsional buckling),指薄壁管在受到较大扭矩时会突然出现结构不稳定。在设计汽车传动轴时,我们经常想办法避免出现扭曲屈曲现象。另外,在生活中,当我们制作香肠或扭气球时,也将使用类似的原理来实现快速分节效果如何开发新的柔性驱动器?
扭转屈曲现象
由香港大学陈永华教授领导的研究团队发现,当扭转时乳胶弹性管壁厚适中(管径约为壁厚的6-8倍)时,会出现可重复螺旋变形,而且这种商用乳胶管弹性(600%)及长期使用寿命,因此可以被反复扭转(几万次)而不损坏。利用这种特定的变形,研究团队设计了一个新的无束缚多模式流体驱动,即扭转管驱动(twisting tube actuation,简称TTA)”。
乳胶弹性管的扭曲和弯曲
乳胶弹性管的扭转应变图
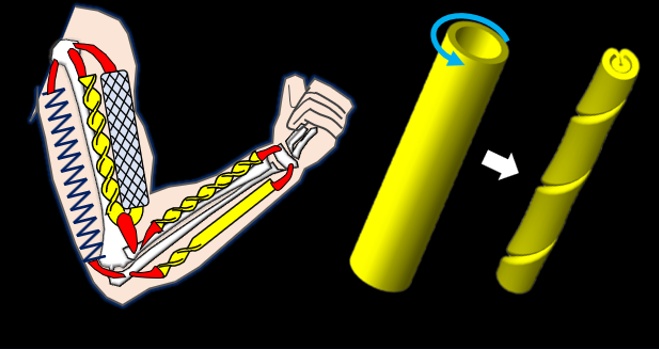
当我们选择乳胶弹性管,密封两端,留出气管接口。然后在其中充满气体(也可以是液体),当弹性管一端连续输入扭转时,管内密封的气体会不断挤出,相当于为外界提供了逐渐增加的气压,类似于泵的作用。同时,由于橡胶管弯曲变形,长度方向会缩短,从而提供收缩力。
解释扭转管驱动器的原理
显示扭转管驱动器
作者指出,他们的设计是结合传统泵,可输出压力以及另一种非常经典的驱动方式,扭转绳驱动(twisted string actuation”), 也就是说,沿轴向收缩运动是通过不断扭转的绳子实现的(文末附参考文献)。前两种驱动模式都是电机输入对应单一输出:即收缩力或气压/液压。但是新的扭转管驱动(TTA)在电机的单一输入下,实现了模式轴向收缩和气压/液压输出大大提高了驱动效率,实现了无限流体驱动。
扭转管驱动(TTA)的实验测试
研究者对TTA测试, 扭转充满压缩气体的细长乳胶管,实验数据显示,收缩力和输出压力随电机旋转圈数的变化而变化同步增加。
TTA一个很大的特点是可以实现多种组合模式,从而实现不同的功能。研究团队利用这一特点开发了一个仿生机械臂,所有机械臂都由扭转管驱动(TTA)驱动不同模式的方式,实现自体柔性机器人的设计,无需外接气泵或液压泵。先来看看仿生机械臂的展示(文末附有完整视频)。下一部分将介绍和分析各种模式的设计。
仿生机械臂基于扭转管驱动设计扭转管驱动器的各种变体及应用
乳胶管多模式驱动可以通过分段、添加不同的约束和改变安装方式来实现。研究人员给出了以下三种典型的设计。值得注意的是,这三种模式都实现了无约束的流体驱动,使流体驱动的柔性机器人更加实用。(详细分析可参考文章末尾的论文链接)
三种典型的扭转管驱动模式
三种模式是:1. 单一泵模式:在乳胶管的一部分外部加入气动手指的约束,可以驱动气动软体手指。. 串联安装:将部分乳胶管外部加入尼龙网约束,可实现大位移的串联柔性驱动模式,由扭转管和气动肌模式。. 并联安装:将类似扭转端的气动肌肉并联到扭转管驱动器的一侧,以实现并联柔性驱动模式的大收缩力。
在这项研究中,研究团队展示了一个完全基于扭转管(TTA)拟人机器人手臂采用这种全新的驱动方式设计。机械臂的肘关节由并联驱动器驱动,手指由安装在躯干的泵模式驱动器驱动。
柔性机械臂基于扭转管驱动的各种模式设计
柔性机械臂样机
仅仅控制电机的转速和圈数,可以实现一些基本任务,如和人互动握手,弹钢琴,抓水瓶(文末完整视频)。值得注意的是,在这款机器人进行动作时,没有涉及到复杂的控制算法或者是精确的传感器信息,在不太担心被机器人伤害的情况下,操作员可以安全地与机器人互动。
机械臂穿着熊猫娃娃服装执行任务总结与展望
可以看出,虽然使用扭转管驱动(TTA)柔性机械臂的性能暂时不尽如人意,不如传统的刚性机械臂灵巧,但它彻底摆脱了气动肌对大型气泵的依赖,通过低成本的材料和精致的设计理念实现了气动柔性机器人的理念。
研究人员团队指出,柔性机械臂是扭转管驱动概念的初步展示,在后续的研究中,扭转管驱动的效果将通过优化设计和材料选择进一步提高。我们有理由相信,扭转管驱动在一些服务机器人或可穿戴设备中具有很大的应用潜力,对精度和输出力要求相对较低,但对柔性和安全性要求高的场景。
同时也希望大家能通过今天的报道得到启发,生活中的一些现象蕴含着深刻的原则。多观察,多思考,一定能创造出许多不同的新奇事物!
参考文献:
Li, Y., Ren, T., Chen, Y., Zhou, J., Hu, Y.,Wang, Z., Sun, W. and Xiong, C., 2020. Untethered Multimode Fluidic Actuation:A New Approach to Soft and Compliant Robotics. Soft Robotics.
网址:https://www.liebertpub.com/doi/10.1089/soro.2019.0131
附扭转绳驱动参考文献:
Gaponov, I., Popov, D. and Ryu, J.H., 2013.Twisted string actuation systems: A study of the mathematical model and acomparison of twisted strings. IEEE/ASME Transactions on Mechatronics, 19(4),pp.1331-1342.


