基于单片机的循迹避障智能小车设计文档
时间:2022-11-10 11:30:07
第3章 系统硬件电路设计3.1总体设计
智能汽车采用两个前轮和一个万向轮,前轮左右两端安装电机驱动,电机驱动芯片L293D控制两个前轮的左右转向和停止。后轮是一个具有支撑和转向功能的通用轮。车身底盘前端配备4个红外光电传感器,实现路径检测和避障功能。
车头还配备了超声波探测模块HC-SR04.当前方检测到障碍物时,汽车可以做出相应的反应。
如图3-1所示。
图3-1 总体设计框图(见附件)
3.2.电源电路设计
电压的稳定性尤为重要,专门设计了稳压电路。采用7805三端稳压集成块,可保持电压为 5V不变。同时,开关为最小系统板上的程序烧写提供了电源。电源电路如下图3-2所示。
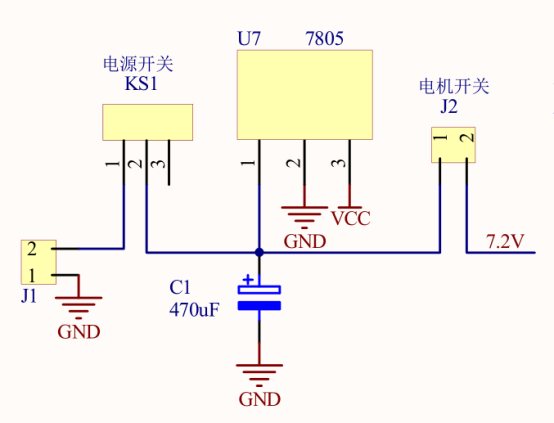
图3-2 5V稳压电源3.3电机驱动电路设计
L293D 共有16个引脚,属于DIP封装。H桥驱动程序是高电流的四倍。双极脉冲调宽有许多优点,如低速时更稳定;释放连续电流;四角限运行;电机停止工作后产生微振动电流,有助于去除旋转时的静摩擦死区。L293D能量信号可以调节脉宽。将不同的值输入H桥电路后,电机将向不同的方向旋转。不仅如此,在L293D芯片上有两个H桥电路,说明两个电机可以同时由一个芯片直接控制。电机有三个必要的信号,一个是使能信号EN12.另一个是旋转方向的控制信号IN1和IN2。当IN1=1、IN2=0时,当电机开始正向旋转时,IN1=0、IN2=1时,电机开始相反旋转。选中一PWM连接使能端引脚,然后PWM占空比直接与整个电机的旋转速度挂钩。选中一I/O通过反向器74口HC14与两个方向控制信号的引脚相连接,使其控制转向问题。
L293D引脚图如下图3-3所示。
图3-3 L293D引脚图
其中L293D如下图所示,电路原理图和内部逻辑等效图。
图3-4 电机驱动原理图
图3-5 L293D内部等效图3.4黑线循环设计与实现
汽车跟踪的原理是在白色路面上粘贴黑色胶带的轨道上运行。由于不同颜色的光吸收程序不同,自然反射的数据也不同,因此道路的黑白可以通过最终收到的反射光来判断。本设计采用了广泛使用的红外光检测方法,操作相对简单。
事实上,红外光的原理很简单,就是红外线对各种颜色有不同的反射性质。汽车开始始前进时,传感器的红外发射二极管将释放红外线。如果汽车在白色道路上行驶,车底红外发射管发出的红外线将反射回来。一旦接收管接收到红外信号,它将导致光敏三极管,从而输出低电平,并通过电压比较器输送到单片机控制。如果汽车开始位于黑色胶带轨道上方,黑色物体可以吸收一直释放的红外线,三极管立即被阻断,信号变为高电平。这样,红外线就可以判断是否有信号。如果前面的信号被传输到单片机继续判断,I/O口发现是高电平的信号,则意味着光线并没有被反射回来而是被黑色吸收,小车是处于黑色胶带上前进。相反,如果发现信号为低电平,则表明汽车在白色道路上。也就是说,如果车底红外接收管遇到黑线,输入电平为高电平,反之亦然。这也是避障的原则。
传感器原理图如图3-6所示。
图3-6 传感器模块电路原理图3.设计5红外避障电路
红外避障的原理与黑线基本相似。它们都利用光的反射性质。只要阻碍物体在前方挡路,以前释放的光就可以反射回来。因此,传感器输出的电平为0,L3、L灯亮了。当前方没有障碍物时,由于传感器位于汽车上方,传感器反射能力不强,只能反射一点红外光,不能使传感器运行,因此传感器输出电平1。传感器片机检测传感器的输出端电平是高是低,可以知道是否有障碍。3.6超声波避障设计3.6.1超声波避障原理
超声波探测传感器是本设计的避障功能。将传感器固定在汽车前面,提前调整测量距离,只要在可检测距离内,一旦道路前出现障碍物,单片机可立即收到传感器发出的信号,使汽车开始改变原始方向,避免撞到障碍物。因此,超声传感器具有频率高、速度快、方向性好等优点。3.6.超声波模块工作原理
本设计采用HC-SR04超声波探测模块,给出高电平信号(大于10千赫兹),HC-SR04模块就会释放出八个方波(约40千赫兹),而且检测是否信号返回来完全是自动的。一旦模块在这里收到返回信号,它将被允许IO输出高电平,高电平维持多长时间,说明超声波从发出到回来的时间是多长。测试距离有一个公式,等于高电平维持时间乘以声速,因为是往返距离,所以除以2。
如图3-7所示,选择超声波完成避障的电路连接。
图3-7 超声波避障电路原理




