vrep中接近开关与激光雷达
时间:2022-12-21 04:00:00
一、接近传感器
1. 类型
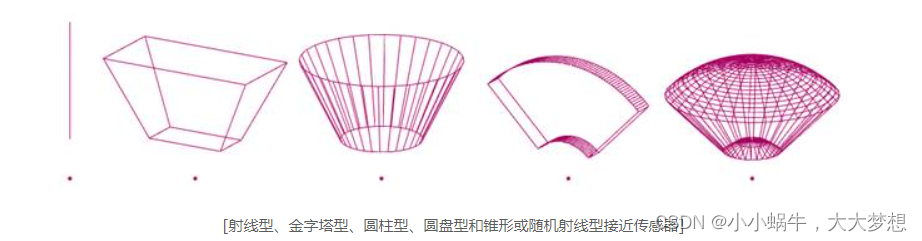
(1)、射线型:射线接近传感器非常适合对接近传感器或激光测距仪进行非常简单的建模。最快的接近传感器。
(2)、随机射线型:随机射线接近传感器作为射线传感器工作,随机扫描锥体体积。外观与锥形接近传感器相似。
(3)、金字塔型:金字塔接近传感器非常适合简单建模检测体积为矩形的接近传感器。非常快。
(4)、圆柱型:圆柱形接近传感器非常适合简单建模检测体积为旋转的接近传感器。非常快。
(5)、磁盘型:磁盘接近传感器允许用卷轴扫描检测体积准确建模接近传感器。根据所选的精度和操作模式,可能需要更多的计算。
(6)、锥形:锥形接近传感器允许对大多数接近传感器进行最佳和最准确的建模。根据所选的精度和操作模式,可能需要更多的计算。
2. 检测机制
接近传感器以几何精确的方式工作:它们在传感点(小球)和任何干扰其检测体积的可检测实体之间进行精确的距离计算(它们不像大多数其他模拟软件那样在传感体积边缘进行简单的碰撞检测,而是在检测体积中进行精确的距离计算)。每个接近传感器将计算以下最小距离:
感应点<-- -->(可检测实体∩检测体积)
3. 接近传感器属性设置
(1).Sensing point size:对检测无影响,即使显示尺寸很大,也被认为是一个点;
(2).Entity to detect:只检测带标签的可检测实体(带标签,即设置Detectable properties);
(3).Explicit handling:指示传感器是否显式处理,如果选择,则应调用sim.handleProximitySensor(sim.handle_all_except_explicit) 传感器不处理,只有当调用sim.handleProximitySensor(sim.handle_all) 或 sim.handleProximitySensor(proximitySensorHandle),传感器处理;
(4).如果用户想在子脚本中处理传感器,而不是在主脚本中(如果没有检查,传感器将被处理两次,并在主脚本中调用一次sim.handleProximitySensor(sim.handle_all_except_explicit),在脚本里一次sim.handleProximitySensor(proximitySensorHandle)),这很有用。
4.接近传感器检测参数的设置
(1).Front / back face detection:用户决定在三角形的哪一侧看到和检测传感器 triangle edit mode中,Front faces为蓝色,back faces为红色
(2).Fast detection (approximate):但准确性降低
(3).Limited angle detection:选择时,可以指定检测光和物体表面法向量的最大角度,这在超声波接近传感器时非常有用(超声波传感器通常看不到面向传感器向传感器的物体表面)。当最大角度设置为小时时时测速度大大提高。
(4).Don’t allow detections if distance smaller than:设置最小检测距离(a mask distance),如果简单地设置检测体积偏移,模拟真实情况(太近检测不到)(an offset for the detection volume),也会增加检测距离(不想看)
(5).Randomized ray detection:适用于接近传感器的随机光型
如果接近传感器检测到对象,触发器将被激活,触发器将被调用。
二、激光雷达
激光雷达首先在当前位置发出激光,接收反射光束,分析距离信息,然后激光发射器再次重复这个过程。由于物理和机械的限制,激光雷达通常有一些盲点。使用激光雷达返回的数据通常可以位于雷达扫描中心0-360的极坐标图°整个圆由扫描区和盲区组成。在扫描区域,激光雷达在每个角度分辨率对应位置分析的距离值将依次连接,通过极坐标非常直观地看到周围物体的轮廓。激光雷达扫描范围示意图见下图。
激光雷达通常有四个性能测量指标:测距分辨率、扫描频率(有时扫描周期)、角度分辨率和视觉范围。在给定距离下,测距的精度通常与距离真实值相差5-20mm;扫描频率测量激光雷达完成一次完整扫描的速度,通常是10Hz以上;角度分辨率直接决定激光雷达一次完整扫描能返回多少样本点;视觉范围是指激光雷达完,视觉范围外即为盲区。
VREP模型浏览器的components/sensors目录中包含多种激光雷达。包括:Hokuyo URG 04LX UG01、Hokuyo URG 04LX UG01_Fast、Hokuyo URG 04LX UG01_ROS、SICK S300 Fast、SICK Tim310 Fast、velodyne HDL-64ES2和velodyne VPL-16。其中Hokuyo URG 04LX UG01、Hokuyo URG 04LX UG01_Fast、Hokuyo URG 04LX UG01_ROS、SICK S300 Fast、SICK Tim310 Fast这几种激光雷达可视范围为270°,是用视觉传感器来模拟激光雷达,可以拆分为2个视角135°的视觉传感器来凑成270°如下图所示。
velodyne HDL-64ES2和velodyne VPL-16两种型号的激光雷达是由四个VisionHandle组成,其实每个Handle对应坐标系的90度,组合在一起就是整个360度的空间。
Hokuyo URG 04LX UG01使用手册网址:hokuyo-urg-04lx-ug01-specifications - 百度文库
SICK S300使用手册网址:SICK S300 软件应用 - 百度文库
SICK Tim310使用手册网址:sick tim310激光安全扫描器.pdf 免费在线阅读
velodyne HDL-64ES2使用手册网址:Velodyne lidar 威力登64线激光雷达用户手册63-HDL64ES3 REV J MANUAL,USERS AND PROGRAM GUIDE,HDL-64E S3 - 道客巴巴
velodyne VPL-16使用手册网址:Velodyne lidar 威力登16线激光雷达用户手册VLP-16-User-Manual - 道客巴巴
相关代码:(内容不全,文件太大上传不了,可以找我要)


