基于 ESO-PLL 的永磁同步电机无位置传感器控制
时间:2022-11-13 15:30:00
基于 ESO-PLL 永磁同步电机无位置传感器控制
1、PMSM
无位置传感器控制方法分为零、低速高频注入法和中高速观测器法两类。在中高速范围内,最常见的方法是先构建反电动势或磁链观测器,然后提取反电动势或磁链中包含的速度或位置信息。观测器方法在零、低速范围内稳定性差,可能完全失效。对于反电动势观测器,由于零、低速范围内的反电动势信噪比
较高,尤其在接近零速时,转子在任何位置的反电动势均接近
0.它会导致无法提取有效信息。逆变器的非线性因素(功率管压降、死区等)会在观测结果中产生一定的谐波重量。研究表明,谐波振幅值会导致算法在零和低速范围内不稳定。理论上,转子磁链不是
因此,磁链观测器不受转速幅值的限制,但其稳定性仍受其他因素的影响。
2.观察反电动势或磁链信息后,可以通过反正切割直接计算转子位置,然后用微分计算转速,但微分不能抑制噪声,甚至可能发散计算结果。(phase
locked loop,PLL)方法通过 PI 无需微分操作即可获取转速信息。PLL 广泛应用于无位置传感器控制。PLL
旋转坐标系型、速度跟踪器型、外差法等形式多种多样。虽然传统的PLL误差抑制效果好,但转速变化时动态性能差。
3.为了提高无位置传感器控制器的性能,可以通过全维、降维观测器或模型参考自适应法获得转速,但算法结构需要大大改变。如果继续使用常见的反电势或磁链观测器,可以构建额外的转速观测器或二级
PLL
增加补偿。]转速观测器采用电机的机械运动方程构建。文献采用外差法构建模型参考自适应速度估计器,并以估计速度作为反馈,以改进切割操作。文献提出了一种带有前馈补偿的方法
PLL,前馈补偿项目是通过一级低通滤波器过滤高频噪声和干扰,理论上可以证明泰勒的扩展: PLL 当角度为抛物线函数时,稳态跟踪误差为
0.文献中提出了一个基础 p 重量构造的带前馈补偿 PLL。文献利用小信号法分析了负载变化过程,并在此基础上提出了带速度补偿的增强型
PLL,从而提高负载变化时的鲁棒性。关于如何通过 PLL 当转速指令和负载变化时,动态性能得到改善,相关研究相对较少。
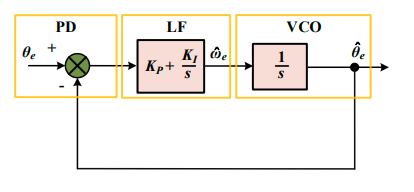
本文提出了不使用任何机械参数的高阶形式 PLL 方法:以角加速度为扩张状态变量 来 构 造 扩 张 状 态 观 测 器 (extended state observer,ESO),并将其作为 PLL 中环路滤波器(loop filter, LF),ESO 压控振荡器中的位置估计过程是(voltage-controlled oscillator, VCO),反正
切所得角度和 ESO 计算所得角度的差异是鉴相器(phase detector, PD)。并分析了 ESO-PLL 增益整定方法。通过模拟和实验验证,ESO-PLL 可有
提高电机在转速指令和负载变化时的动态性能。
说白了,就是在数学模型的基础上,对原来PLL这方面的优化改造非常简单。请仔细看
当然,传统PLL我不会总结这个模型。不会的学生会在下面留言
传统PLL的控制框图**
PLL的传递函数
2、ESO-PLL 选择原则和增益
2.1、ESO-PLL 基本结构
以下是本文提出的 ESO-PLL 推导。以转速微分为例。 ESO 在扩张状态变量中,变量的物理意义是角加速度。电机角度、转速和角加速度均为导数关系:
式中,ae表示角加速度,d 表示加速。
上述模型的状态方程为自然串联积分
类型。根据线性系统理论,系统矩阵 A、C 分别表
示为:
可验证状态方程符合可观性条件:
以上推导,ESO 结构如下所示。ESO 加速度作为扩张状态变量处理,避免使用机械运动方程,只有整个观测器增益,无需识别机械参数,如旋转惯量
式中,z1、z2、z3 状态变量,β1、β2、β3 为ESO 增益(β1、β2、β3>0)。综上所述,本文提出了转速估计的用途ESO-PLL 基本原理图如下图所示 所示。反正切和PLL 角度的差异是 PD,ESO 作为 LF,ESO 中
角度估计环节为 VCO。无位置传感器矢量控制结构如下下图 所示
ESO-PLL 基本原理图
无位置传感器矢量控制原理图
2.2.我不会谈论增益的选择。simulink里面给你们
3、simulink总体仿真
3.1、转速环
3.2、电流环
3.3、mod
3.4、SMO
这里面的SMO
这里面的ESO_SMO
这里面的ESO
这里面的ESO的增益数值
3.5、实际位置与跟踪位置
3.6、实际位置与跟踪位置的误差
3.7、实际转速与估计转速
3.8、实际转速与估计转速的误差
4、总结
由于这篇博客是根据别人的论文复现的,所以只能是呈现这种效果,能力有限,参数上面有待提高,还有就是磁链观测器和滑膜观测器的效果差不多,不用计较这个,还有一些参数我好像没有截图给出具体的值,你们如果想研究请评论我给你们发具体数值


