STM32F1与STM32CubeIDE编程实例-红外寻迹传感器驱动
时间:2022-11-10 04:00:01
传感器驱动红外搜索
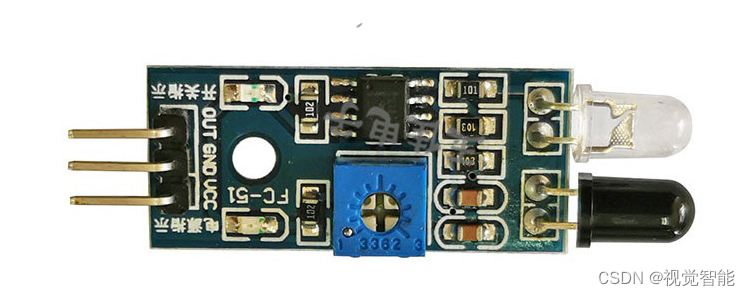
红外搜索传感器有一对红外发射管和接收管,发射管发射一定频率的红外,当检测方向遇到障碍物(反射面)时,红外反射被接收管接收,比较电路处理后,输出接口输出数字信号(低电平或高电平,取决于电路设计),有效范围一般为2~30CM。因此,反射率和形状是检测距离的关键。黑色探测距离小,白色距离大;小物体距离小,大面积距离大。
本例将演示如何使用红外搜索传感器。当检测到方向障碍物信号时,电路继续输出低电平。
1.红外搜索传感器配置
请参考开发环境建设、系统时钟配置、调试配置和串口配置:
- STM32F1与STM32CubeIDE快速入门-开发环境建设
- STM32F1与STM32CubeIDE快速入门-GPIO概述与点亮LED
- STM32F1与STM32CubeIDE快速入门-USART/UART串口通信
传感器配置如下:
保存配置并生成代码。
2.红外传感器驱动
1)基本定义
/* * infrared_tracking_sensor.h * * Created on: Apr 23, 2022 * Author: jenson */ #ifndef __INFRARED_TRACKING_SENSOR_H__ #define __INFRARED_TRACKING_SENSOR_H__ #include#include #include "main.h" typedef struct { uint16_t id; GPIO_TypeDef *GPIOx; // 总线端口 uint16_t GPIO_Pin; // 总线引脚 } infrared_tracking_sensor_t; /** *@brief 传感器状态的红外搜索 *@param sensor 开关对象 *@return 当开关关闭时,返回1;否则返回0 */ uint8_t infrared_tracking_sensor_check(infrared_tracking_sensor_t* sensor); #endif /* __INFRARED_TRACKING_SENSOR_H__ */
2)传感器状态检测
/* * infrared_tracking_sensor.c * * Created on: Apr 23, 2022 * Author: jenson */ #include "infrared_tracking_sensor.h" uint8_t infrared_tracking_sensor_check(infrared_tracking_sensor_t *sensor) {
// 读取传感器输出电平 if (HAL_GPIO_ReadPin(sensor->GPIOx, sensor->GPIO_Pin) == GPIO_PIN_SET) {
return 1; } return 0; } 3)主程序
在main.c文件中添加如下代码:
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include 程序运行结果:
3、红外寻迹传感器中断方式配置
前面的驱动代码是基于循环轮询实现,比较耗CPU。可以通过外部中断方式来对传感器输出信号进行检测。关于外部中断使用,请参考:
- STM32F1与STM32CubeIDE快速入门-中断、NVIC与EXTI概述
- STM32F1与STM32CubeIDE快速入门-外部中断配置与功能实现
传感器的中断方式驱动配置如下:
保存配置并生成代码。
4、红外寻迹传感器中断方式驱动实现
1)基本定义
/* * infrared_tracking_sensor.h * * Created on: Apr 23, 2022 * Author: jenson */
#ifndef __INFRARED_TRACKING_SENSOR_H__
#define __INFRARED_TRACKING_SENSOR_H__
#include 2)中断服务实现
在stm32f1xx_it.c文件中添加如下代码:
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "infrared_tracking_sensor/infrared_tracking_sensor.h"
/* USER CODE END Includes */
/* USER CODE BEGIN EV */
extern infrared_tracking_sensor_t sensor;
/* USER CODE END EV */
/* USER CODE BEGIN 1 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) {
if(GPIO_Pin == sensor.GPIO_Pin){
if(sensor.callback){
sensor.callback(sensor.id);
}
}
}
/* USER CODE END 1 */
3)主程序
在main.c文件中添加如下代码:
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include 程序运行结果:


