F103c8t6+Cubemx+Mpu6050串口输出
时间:2022-10-28 02:30:00
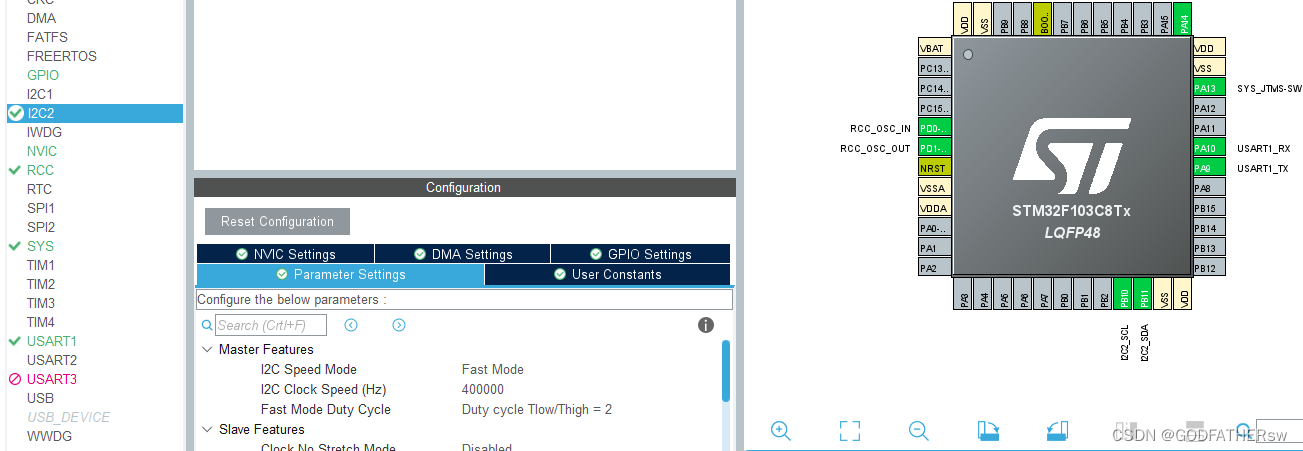
Cubemx配置
串口显示
所导入的MPU6050库https://pan.baidu.com/s/1DneM4xr7O9hCuUpCis1TBw
Main.c
// An highlighted block /* USER CODE BEGIN Header */ /** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * @attention * ** * This software component is licensed by ST under BSD 3-Clause license, * the "License"; You may not use this file except in compliance with the * License. You may obtain a copy of the License at: * opensource.org/licenses/BSD-3-Clause * ****************************************************************************** */ /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "i2c.h" #include "usart.h" #include "gpio.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ #include "mpu6050.h" #include "inv_mpu_dmp_motion_driver.h" #include "inv_mpu.h" /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ /* USER CODE END PTD */ /* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ /* USER CODE END PD */ /* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */ /* USER CODE END PM */ /* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN PV */ float pitch,roll,yaw; //欧拉角 short aacx,aacy,aacz; ///加速度
© Copyright (c) 2022 STMicroelectronics. * All rights reserved. 传感器原始数据 short gyrox,gyroy,gyroz; //陀螺仪原始数据 short temp; //温度 /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); /* USER CODE BEGIN PFP */ /* USER CODE END PFP */ /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ #ifdef __GNUC__ #define PUTCHAR_PROTOTYPE int __io_putchar(int ch) #else #define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f) #endif PUTCHAR_PROTOTYPE { HAL_UART_Transmit(&huart1, (uint8_t *) &ch, 1, 0xFFFF); return ch; } /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_I2C2_Init(); MX_USART1_UART_Init(); /* USER CODE BEGIN 2 */ while(MPU_Init()); //初始化MPU6050 while(mpu_dmp_init()) { HAL_Delay(200); printf("%s\r\n","Mpu6050 Init Wrong!"); } printf("%s\r\n","Mpu6050 Init OK!"); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0) { temp=MPU_Get_Temperature(); //得到温度值 MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据 MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据 printf("三轴角度:%f-%f-%f\r\n",pitch,roll,yaw); printf("三轴加速度:%d-%d-%d\r\n",aacx,aacy,aacz); printf("三轴角角度:%d-%d-%d\r\n",gyrox,gyroy,gyroz); } HAL_Delay(200); } /* USER CODE END 3 */ } /** * @brief System Clock Configuration * @retval None */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = { 0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = { 0}; /** Initializes the RCC Oscillators according to the specified parameters * in the RCC_OscInitTypeDef structure. */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB buses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK) { Error_Handler(); } } /* USER CODE BEGIN 4 */ /* USER CODE END 4 */ /** * @brief This function is executed in case of error occurrence. * @retval None */ void Error_Handler(void) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ __disable_irq(); while (1) { } /* USER CODE END Error_Handler_Debug */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t *file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /* USE_FULL_ASSERT */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/