一些必备知识
时间:2022-10-06 20:30:01
成像分为
1.被动测量方法:单目立体视觉、双目立体视觉、多目立体视觉(特斯拉有三个前视摄像头)
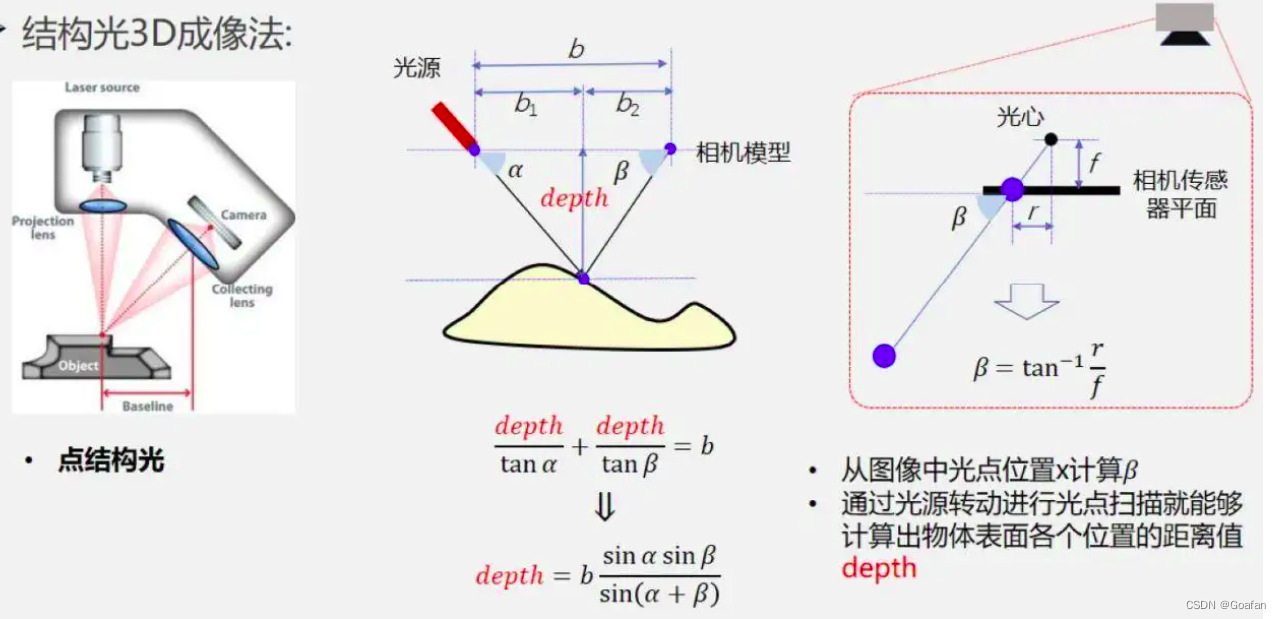
2.主动测量方法:结构光3D成像(点、线、面结构光),TOF 3D成像(脉冲法、相位法)
双眼视觉的原理是用两个摄像头观察统一的场景,从不同的角度获取感知图像,然后通过三角测量原理计算图像的视差来获取场景的三维信息。
结构光测量系统主要由结构光投影系统和图像采集处理系统组成 。基于光学三角测量原理,特定的结构光通过投影设备投射到被测物体上,在被测物体表面形成相同形状的光条三维图像,被另一台相机检测到。
我们常用的手机、相机等面阵式相机,一次可以拍到整张照片。
线扫描检测主要用于纺织、印刷等特殊行业。
双目相机测量及线结构光如下:
TOF是Time of Flight缩写,又称飞行时间法成像技术,其原理是通过连续向目标发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行时间获得目标雾距离。其原理如下图所示。


