两点称重技术,网上搜不到的重点(三):单AD测量
时间:2022-10-11 03:30:00
一、多点称重
用传感器称重,我们称之为单点称重。与单点称重相比,自然是多点称重。多点称重是用多个传感器称重。它们可能如下(如图3-1所示):
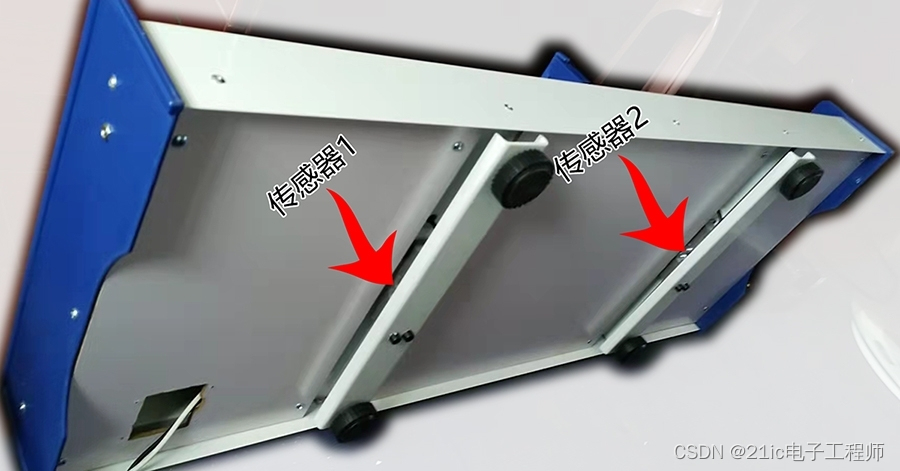
图3-1 由两个单点传感器组成的两个称重点
也可能是以下样子(如图3-2所示):
图3-2 由四个单点传感器组成的两个称重点
也可能是你自己设计的。
二、称重两点
这里只讨论两点称重。
结构变了,力学关系也变了。
先看单点称重理想分析(如图3-3):
图3-3 单点称重力学分析
从以上分析可以看出,单点称重的力学关系在理想状态下极其简单,这也是我们在单点称重时盲目做的原因。 我们来分析一下两点称重的力学关系(如图3-4所示)。
图3-4 称重力学分析两点
我们知道,从物理力学的角度来看,准确分析和推导一个结果仍然很困难,甚至使用导数微积分,我早就忘记了25。然而,无论如何推导一个公式,它都必须符合一个规则,即当一个物体在某个方向处于静止状态时,该方向的合力为0。有了这个盲分析的基础,我们可以利用初中教科书的知识来解决大学教科书的问题。 现在,让我们解释一下公式g = -(f31 f32)的含义。 两个传感器提供的支撑力之和是去除称重机构分摊自重,被称物体向下重力,但方向相反。这显然是合理的,更不用说初中物理甚至小学文化,我用脚趾知道这个事实。三、二点称重信号处理 根据分析,我们知道两个称重重量实际上是两个传感器称重量的叠加,这显然应该映射成信号处理中的信号叠加。
我们解剖了前面的帖子,这个传感器是电阻。电阻在电路中有两种叠加方式,一种是串叠加,另一种是叠加。无论什么样的叠加,信号的变化都能反映在电压信号上。因此,如果我们不使用公式,全靠感觉盲分析,这两种叠加是可以的。 有了这个理论基础,下一步就是实践。从实践的角度讲,显然是并线比较简单,只要把对应的先拧在一起就行了。串联需要考虑很多拓扑问题……。当然,我不会浪费这种力量。我喜欢怎么简单。 然而,作为一种产品,你把线拧在一起并不是很正宗。正宗的做法是做一个接线HUB(如图3-5):
图3-5
这样,装配时**(如图3-6所示):
图3-6
四、标定
操作猛如虎后,仔细想想原来的程序还能走。这很简单。上电,校准!……出乎意料的是,标0还算顺利,标20么开心,过不去(如图3-7所示):
图3-7
直觉感觉应该是接收的数据不稳定,这个代码要看……
看了看,数据确实不稳定。不仅数据不稳定,还有白看的感觉,因为debug我们看到的数据不是实时数据。实际操作时,0.08秒取一次数据,debug不知道看多少秒,这似乎意义不大。所以,看数据这个操作就好了。
经过反复的实践,我们发现标20并不总是不能标记过去。在某个时间段,它仍然很容易通过,但在另一个时间段(例如,在下午5点之后),它不能通过。……?
总归,数据不稳定,是现象。是什么导致了这个现象?难道是传感器自带生物钟?到了时间点就摆烂?这显然我不信。于是我就只有怀疑我这附近有一个定时发生的干扰源了。
但我没有证据,也没有爱情战争。所以我把这个问题留给了坛友,我只想知道真相。
为了绕过这个问题,我在过去容易标记的时候完成了校准。请原谅我对学科的不严谨态度。
五、称重
校准完成后,自然称重。如果是两点称重,就要多点检测称重的准确性。
先看左侧称重(如图3-8):
图3-8
嗯?19.99kg,貌似很准哪!这就意外了。再看右侧称重吧,我有一种不详的预感,这侧也差不多是准的(如图3-9):
图3-9
嗯?20.01kg?果不其然哪!这莫不是开挂的节奏?准虽然是好事,但这并不是写本帖所要的结果。因为在此之前的大量证据表明,现在这种结果绝对是一个例外。既然意外了,我们还是将意外进行到底吧,最后验证一下中间称重(如图3-10):
图3-10
20.00kg。这在意料之中,算不得悬念。在什么位置标定,在什么位置称重,当然是最准的。
不过,这里,准确值并不是我想要给大家看的。按理,大概率事件应该是中间标定,中间标定点称重是准的,然后两端称重,一端偏轻,一端偏重,并且这个规律固定,不会出现某端时重时轻的情况。
不过,称重时,能见到重量值±0.01的跳动,说明传感器信号的稳定性不是那么好,这也为标定时会出现标不过去的情况提供了一个真相。
六、纠偏
既然这次撸帖没撸出不平衡的测试样,我就只有口述纠偏这个事了。
两点称重的大概率情况,两端称重是不准的,会存在一端恒重、一端恒轻的情况,并且两端的误差绝对值并不相同。
也就是说,两点称重,通常存在偏差。这是因为机械结构的非对称性、传感器固有参数的非对称性、装配导致的非对称性造成的。总之,就是因为相同的重量在两个传感器上产生了不同的测值,导致了简单地叠加计算出现了偏差。
既然出现了偏差,就应该着手纠偏。纠偏也就从导致偏差的原因着手进行。
1、选择刚性较好的受力支撑材料;
2、提高机械加工工艺,生产出精度高的工件,例如孔位准确,孔垂直度高;
3、尽量减少机械自重在两个传感器上的分摊偏差;
4、选择固有参数尽量一致的传感器配对使用;
如果,我是说如果,这四步能让你的两点称重秤获得较好准确性,下面的操作就不需要了。因为有些操作在生产上,是一种很痛苦的抉择。
5、通过分别在两个传感器+EXE端各接一个电位器,来调节测值纠偏(如图3-11):
图3-11
具体做法是,将标准砝码放一个传感器上,调节该传感器的电位器,达到一个理想值(譬如,等于砝码重),然后将标准砝码放另一个传感器上,调节该传感器的电位器,与前一个传感器理想值相同,然后再重复这个过程,直到砝码在两个传感器上都称出相同的值为止。 这种电位器调信号平衡纠偏的方法很管用,甚至很多地磅上确实使用的是这种纠偏方法,但是,这个纠偏的过程很痛苦。如果批量生产,这种操作将会直接影响你的产量。然后就是,如果你调准了,你该如何保持这种状态?你或许会说,我可以把电位器的旋钮打上螺丝胶固定,这样貌似是一个不错的办法,但是,如果你的机械结构在运输途中出现了变化,你又将如何自处?所以很多秤就把电位器调节供能留给用户自己玩了。你看,这就是个技术瓶颈,你若不会玩,那就要学习了。然后这门技术,其实就是个**肋。
当然,从生产的角度讲,谁也不敢保证自己做好了1、2、3、4后就解决问题的,所以5通常也难以省略。但是理论上,一个可靠的生产工艺,是可以做到省略5的。这就告诉我们,生产工艺是一个非常非常重要的知识产权,得重视!
---------------------
作者:yyy71cj
链接:https://bbs.21ic.com/icview-3221312-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。


