示例项目:简单的六足步行者
时间:2022-09-07 15:00:01
示例项目:简单的六足步行者
查看原文
查看多页文档。
也可以打印 PDF 查看此文档的格式。
- 1. 引言
- 2. 材料和工具
- 3. 施工
- 4. 六足动物步态测序
- 5. 用脚本避障
- 6. 修改和改进建议
- 7. 结论和社区
1. 引言
六足是一种简单而强大的步行系统,在动物王国和机器人爱好者中非常流行。从简单的单电机玩具到18个或更多伺服器的高级平台,机器人六足动物的范围。本教程向您展示如何使用三个伺服器构建一个非常简单的独立六脚机器人。高六脚架可向前和向后行走,并可左右旋转。两个前视距离传感器提供避障功能。六足动物的大脑是Pololu Micro Maestro,这是一个6伺服控制器,可以在存储脚本中读取输入并播放运动序列。
请参阅微型大师用户指南的完整文件。
2. 材料和工具
建造六足动物所需的零件。注:新版本的电池使用 Maestro 附着的接头,而不是特殊连接器。
零件清单:
| 数量 | 部件号 | 部分 | 笔记 |
|---|---|---|---|
| 1 | 1351 | 波罗鲁微型大师部分套件 | 为了获得最紧凑的机器人,可以焊接自己的电线。 |
| 3 | 1053 | 亚微舵机 3.7g 通用 | 这些通用舵机提供尽可能低的成本和重量,但您可以替换其他舵机,例如Power HD亚微舵机HD-1440A,定制设计。 |
| 2 | 1134 | 波罗鲁载体和夏普GP2Y0D810Z0F数字距离传感器10厘米 | 这是一个有足够长范围的小距离传感器,可以让你的六足动物免受麻烦。 |
| 1 | 2251 | 电池组: 4.8 V, 200 毫安时 | 电池组将在5左右 V为六脚架提供五到十分钟的电源。 |
| 3 | – | 巨型回形针 | 用来形成六足动物的腿。展开时,这些应该是6英寸长。 |
所需工具:
这些部件大部分都可以在Pololu找到网站的工具部分。热胶枪可以在大多数工艺品商店买到,只需几美元。
3. 施工
步骤 1.将公接头连接成电池连接器。
找到 Maestro 随附的 1×10 件 0.1 英寸公头。打开一个 1×2 件,并将其焊接到 BAT 和 GND 在引脚上,如图所示。请注意,连接器没有极化,因此必须始终注意黑线路连接到地面,并将红色导线连接到BAT插入电池。
图中显示的连接器来自旧版本的电池。新的看起来不同,但黑色和红色的电线仍然应该连接到Maestro同样的引脚。
将电源连接器焊接到微型 Maestro。
步骤2:设置Maestro的自力。
断开电池连接后,将电线(红色)从公接头的正极连接到VIN。注意不要短路或损坏主板上的任何部件。现在,插入电池后,您的Maestro它应该通电慢慢闪烁其黄色LED,这意味着它正在等待检测串行通信的波特率。您不会使用串行通信,因此您需要在下一步禁止波特率检测。
图中显示的连接器来自旧版本的电池。由于您将使用完全覆盖电路板孔的公针座,请焊接到针座引脚的裸露部分。
微型 Maestro 自供电和电池连接器。
步骤 3:验证 Maestro 伺服器是否正常工作。
第四步:将舵机粘在一起,构建主体。
使用对角线刀具从所有三个伺服器上卸下卡舌。该项目不需要选项卡,可能会干扰伺服器的运动。
接下来,用几滴热胶连接伺服器,如下所示。你不需要太多的胶水来固定它们!尝试准确对齐角,形成平面,用于安装其他部件。
尝试对齐角。
夹住伺服电缆,留下至少2根(如果你没有足够的焊接经验,那就更多了)。从每根电缆的末端剥离少量电线。
伺服引线切割剥离,留约2条线。
步骤5:将伺服器和传感器焊接到微型Maestro上。
这一步需要耐心和关心。第二只手可能很有用。
伺服器的引线用焊料镀锡,使其最初无需额外的焊料即可连接。以下图片为参考,将参考Maestro放在身体背面,中间的电线放在身体背面Maestro在通道1的孔中。将导线保持在这些孔中,并将导线保持在这些孔中Maestro将烙铁从主体上拉开,然后接触到每个连接处,使导线上的少量焊料熔化并固定到位。现在你应该能够为每个连接添加更多的焊料,直到孔被填满,电线被牢固固定。仔细检查是否有松动的电线,这可能会导致短路。
继续将右舵机焊接到通道 将左舵机焊接到通道 2.使舵机排列在与端口相同的相对位置。
将舵机连接到微型 Maestro 上的端口 0、1 和 2。
带微调载板的数字测距传感器。
用旋转工具、砂轮、对角切割机或珠宝商锯切割传感器板,将包含不必要安装孔的零件移除,使其尽可能小。(确保不要剪掉任何痕迹。然后将它们焊接到电缆上,以便连接到电缆上Maestro。使用以下示例 4 带状电缆共享两个传感器的电源和接地连接。带状电缆使组件相对干净,但您可以使用任何可用的电线。向前看说明,看看传感器要去哪里,并确保你有足够长的电缆。考虑如何使电线靠近身体,远离腿和伺服器。
将传感器焊接到四针电缆上。
将传感器电源焊接到地上Maestro上的 5V并将左右传感器的输出连接到通道3和4。请注意,我们使用它 5V而不是电池电压,所以Maestro通道永远看不到更高的电压 - 另一个好处是传感器将在那里USB无需插入电池即可在电源下工作。
现在,您拥有完整的电气组件。插入电池时,传感器应变为活动状态。每当检测到10厘米以内的物体时,就会打开红色LED。使用 Maestro 在控制中心,你应该能够看到输入值 255(当没有对象时)改为 40 左右(检测对象时)的变化。如果 LED 如果它总是亮起,你可能会忘记步骤 3 将端口设置为输入。
第六步:建造腿部。
将回形针展开成直线。钳子在金属中会产生丑陋的凹痕,所以请尝试使用手指和桌子的边缘。
尽量拉直回形针。
电线应该是6英寸长的。为了制作前腿和后腿,请将其中两条折叠成1.5英寸分,两部分之间的角度°,如下所示:
六足动物的前腿和后腿。末端的长度应该是 1.5”。
将第三块折叠成M形,部分长度为1.25“,1.75”,1.75“和1.如下所示:25:
六足动物的中间腿。末端的段长度应为 1.25”。将支腿热粘在伺服喇叭上。中腿使用直角,前腿和后腿使用十字形或圆形角。
将六脚架支腿粘在伺服喇叭上。
连接电池电源后,使舵机保持其空档位置,将喇叭放在舵机上,使腿尽可能靠近空档位置,如图所示。用随附的螺钉将它们固定到位,在拧紧支腿时握住支腿,以免将扭矩施加到脆弱的伺服齿轮上。将 Maestro 粘合到舵机的背面,与底部齐平。
将支腿和 Maestro 连接到伺服器。
**重要:**切勿用手将扭矩施加到腿部,试图阻止它们移动或反向驱动它们。伺服齿轮很容易被打破,所以它们应该只在自己的动力下移动。使用 Maestro 控制中心试验不同的位置,而不是强制使用伺服器。
步骤7:连接电池和传感器。
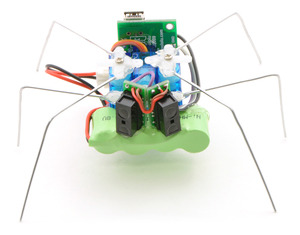
将电池粘在六脚架的前部,与底部齐平,以便有尽可能多的间隙。确保中间的腿有足够的空间向左和向右转动,而不会碰到电池。将传感器粘在电池的顶部,向左和向右倾斜。
组装好的六脚架,前视图。
请注意,布线确实会干扰中间腿的运动。您可能希望以不同的方式路由您的路由。根据需要使用小滴热胶将电线固定到位。
组装好的六脚架,顶视图。
第8步:最后的润色。
使用 Maestro 控制中心查找中性位置(支腿尽可能对称地排列)及其安全最小值和最大值。将中性位置设置为每个伺服器的“转到”值,并设置最小值和最大值,以便六脚架永远不会自我破坏。调整导线的角度,使所有六只脚都以中性位置接触地面,可能是通过将前后腿弯曲到90°以上。
组装好的六脚架,侧视图。
您可能想要做的最后一件可选的事情是在每只脚上添加一点热胶水,这样金属就不太可能划伤您的工作台面。您的六脚架现在已准备好进行编程!
4. 六足动物步态测序
步态
现在你已经建造了你的六足动物,是时候让它走路了。用腿向前行走的方法称为步态,具有许多自由度的动物或机器人具有多种可用的步态 - 人类可以走路,奔跑,跳跃或跳跃;马可以走路,小跑,坎特,或疾驰,等等。你的六足动物是如此简单,以至于它只有一种可能的向前运动的步态,称为三脚架步态。
在三脚架步态中,您的六脚架始终有三只脚与地面接触:一侧的前后腿和中间腿另一侧。中间舵机的角度决定了哪一边向上,哪一边向下。它通过将这些脚向后推到地面上来实现向前运动,而另一只脚在空中向前移动。然后,六足动物将其重量转移到其他三英尺上,并以相同的方式向前移动。通过使用中间的腿不断移动其重量,然后将抬起的脚向前移动,它向前走。
与大师控制中心一起前进
您可以使用 Maestro 控制中心的音序器功能轻松组装运动序列。有关定序器的文档,请参阅《微型 Maestro 用户指南》第 4.c 节。
使用 Maestro 控制中心“状态”选项卡上的控件将六脚架移动到这四个位置中的每一个位置,在每个位置之后按“保存帧”按钮,以保存序列。
| 框架0 右前后,左中腿接触地面 |
|
|
| :-----------------------------------: | ------------------------------------------------------------ | ------------------------------------------------------------ |
| 框架 1 向下的腿向后移动,前腿向前移动 | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-yOEnxfLk-1657001558632)(https://a.pololu-files.com/picture/0J2124.220.jpg?dfd0a2ed1171f439c8611155e0d1365c)] | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-68QjpFXa-1657001558632)(https://a.pololu-files.com/picture/0J2120.200.jpg?78703a6c63ead246330318731d6abbe8)] |
| 机架 2 重量转移到另一个三脚架 | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-K5tnQUm7-1657001558633)(https://a.pololu-files.com/picture/0J2125.220.jpg?bc0742dee89f1c0a71a8340e4f1baddd)] | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ai9QoNKa-1657001558633)(https://a.pololu-files.com/picture/0J2121.200.jpg?e2a54bbc73492672c1e6d1fa80040cd7)] |
| 框架 3 向下腿向后移动,前腿向前移动 | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Aj5xtgUe-1657001558633)(https://a.pololu-files.com/picture/0J2122.220.jpg?4401a4d78dcd5bbd45be504f095e6fa2)] | [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-nTn1BCjy-1657001558634)(https://a.pololu-files.com/picture/0J2118.200.jpg?d5cc6550d080ad7d3da449ea54b5a912)] |
在 Maestro 控制中心的屏幕截图中,您可以看到伺服器始终处于其最小值或最大值,您应将其配置为不会导致伺服器应变的安全值。您的数字可能与此处显示的数字略有不同。如果您以不同的配置组装了伺服器或将它们连接到不同的端口,那么当然,每个框架都会有不同的设置。
在“序列”选项卡上,您现在应该保存了四个帧。选择“循环播放”并播放序列以查看您的六足行走。将序列重命名为“前进”,然后再继续。
自主前进
单击“将序列复制到脚本”按钮,将您的序列转换为可保存在 Maestro 上的脚本。如果您在“脚本”选项卡上选择“启动时运行脚本”选项并应用设置,则您的六足动物将自动开始行走。您现在可以将其与USB断开连接,并允许它自行行走。
重新连接USB并单击“停止脚本”或禁用“启动时运行脚本”选项以使其停止行走。
向后和转向步态
在状态选项卡上,从第 0 帧重新开始,但反向遍历一系列运动以向后行走:第 0 帧、第 3 帧、第 2 帧,然后是第 1 帧。将此序列保存为“向后”,并测试它是否向后移动六足动物。
车削则不同。要创建转弯序列,您需要将所有前腿和后腿一起向前或向后移动,而不是将两侧向相反的方向移动。尝试一下,并保存另外两个序列:“右”和“左”,验证它们是否将六足动物左右转动。
您现在可以对六足动物进行编程以避免障碍物。
5. 使用脚本进行避障
Micro Maestro具有内部脚本语言,可以存储序列,读取传感器,并将所有内容链接在一起以形成智能行为,使您的六足动物真正自主。有关脚本语言的完整文档,请参阅《微型大师用户指南》的第 6 节。
设置完所有基本步态后,请擦除脚本,然后单击“序列”选项卡上的“将所有序列复制到脚本”按钮。此按钮添加了一组子行程,您可以使用这些子轮次级从脚本中访问各种步态。
然后,您可以从脚本中调用这些子例程。例如
【】?
将导致六足动物反复向前迈步,然后向左,一遍又一遍地转动。您可能需要考虑传感器读数,可以使用GET_POSITION命令访问这些读数。下面是一个非常简单的程序示例,该程序使用传感器读数来尝试避开对象 - 自定义它以获得您想要的行为!
?
6. 建议的修改和改进
以下是一些可以对六足设计进行改进或修改的想法:
- 更复杂的脚本行为 – 帮助您的六足动物更可靠地摆脱卡住的情况。
- 更强大的传感器读数。示例代码在每个序列后只读取传感器一次 - 你能做得更好,并更快地检测障碍物吗?
- 替代伺服系统 - 整个设计可以放大。
- 电源开关,因此不必一遍又一遍地拔下电池。
- 升压调节,通过更紧凑的(锂?)电池实现一致的功率。
- 用于线路跟踪或表边缘检测的 QTR 传感器。
- 用于寻光或避暗行为的光传感器。
7. 结论和社区
Micro Maestro可以充当一个简单的六足机器人的大脑。Maestro的六个通道中有三个用于伺服器,因此有三个通道可用于传感器,例如距离传感器,六脚架可以使用它们来对环境做出反应。Maestro的脚本功能允许将简单的行为和运动序列编程到设备上,使六足动物自主。
你有没有设法建造六足动物或类似的东西?请加入我们的机器人论坛,提出问题,提供反馈或分享您的项目。我们很想听听您的经验,我们很高兴看到您所做的任何改进或更改!


