传感器应用之ICM20602六轴
时间:2022-08-26 20:00:00
1 基础知识
1.1 坐标系
- 地面坐标系(earth-surface inertial reference frame)Sg
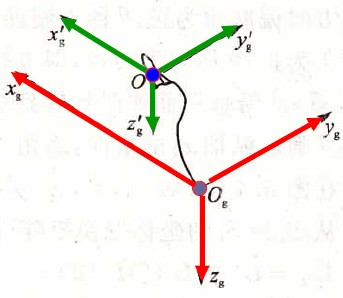
①在地面上选一点Og
②使xg轴在水平面内并指向某一方向
③zg轴垂直于地面并指向地心
④yg轴在水平面内垂直于xg轴,其指向按右手定则确定 - 机体坐标系(Aircraft-body coordinate frame) Sb
①原点O取在飞机质心处,坐标系与飞机固连
②x轴在飞机对称平面内并平行于飞机的设计轴线指向机头
③y轴垂直于飞机对称平面指向机身右方
④z轴在飞机对称平面内,与x轴垂直并指向机身下方
1.2 姿态角(Euler角)
-
俯仰角θ(pitch):载体坐标系X轴与水平面的夹角。当X轴的正半轴位于过坐标原点的水平面之上(抬头)时,俯仰角为正,否则为负。
-
偏航角ψ(yaw):载体坐标系xb轴在水平面上投影与地面坐标系xg轴(在水平面上,指向目标为正)之间的夹角,由xg轴逆时针转至机体xb的投影线时,偏航角为正,即机头右偏航为正,反之为负。
-
滚转角Φ(roll):机体坐标系zb轴与通过机体xb轴的铅垂面间的夹角,机体向右滚为正,反之为负。
1.3 六轴基础
ICM20602是一个六轴运动跟踪装置,它结合了三轴陀螺仪和三轴加速度计
1.3.1 三轴陀螺仪
- 基础介绍
一般用陀螺仪检测偏航角ψ(yaw),但是它实际检测的是角速度,换算角度时需要对角速度积分,这样就会存在积分误差,误差值与积分时间Dt成正比。此外,陀螺仪还存在零点漂移现象,每次上电时需要重新校准偏移值,后续检测时减去偏移值即可消除此误差。
零点漂移:由于各种原因,陀螺仪上往往被作用有人们所不希望的各种干扰力矩,在这些很小干扰力矩的作用下,陀螺仪的陀螺会产生进动,从而使角动量慢慢偏离原来的方向。
- 规格参数
从官方规格表可以看出,陀螺仪量程为±250 dps、±500 dps、±1000 dps和±2000 dps(degree per second,即°/s),分别对应的灵敏度为131、65.5、32.8和16.4 LSB/dps。
量程与灵敏度解释:
ICM20602数据寄存器是一个16位的,由于最高位是符号位,故数据寄存器的输出范围是-7FFF~7FFF, 即-32767~32767。所以当灵敏度为16.4 LSB/dps、读取的陀螺仪值为32767时,对应的角速度为2000°/s。在姿态解算时,需要把角度换算成弧度,即: 1 ° / s = π 180 = 57.3 r a d / s 1°/s =\frac{π}{180}=57.3rad/s 1°/s=180π=57.3rad/s
1.3.2 三轴加速度计
- 基础介绍
一般用加速度计检测俯仰角θ(pitch),它通过检测器件在各个方向的形变情况而采用得到受力数据,根据F = ma转换,传感器直接输出加速度数据。由于地球存在重力场,重力任何时刻都会作用与传感器,所以静止时检测出加速度为1g,只有当传感器做自由落体运动时才会输出0g。
加速度计不会区分重力加速度与外力加速度,当物体运动时,它也会在运动的方向上检测出加速度,所以加速度计对振动之类的噪声比较敏感。 - 规格参数
从官方规格表可以看出,加速度计量程为±2 g、±4 g、±8 g和±16 g,分别对应的灵敏度为16384、8192、4096和2048 LSB/g。上述已解释含义,不再赘述。
参考资料:什么是姿态角
2 姿态解算之互补滤波
加速度计的静态稳定性更好,而在运动时其数据相对不可靠;陀螺仪的动态稳定性更好,但是静止时数据相对不可靠。因此,我们可以短期相信陀螺仪,长期相信加速度计,使用互补滤波算法可以很好的解决这个问题,即通过加速度计的输出来修正陀螺仪的积分累积误差。
2.1 基础知识
- 姿态
所谓的姿态,就是公式+系数。比如:欧拉角公式和欧拉角的系数(翻滚、倾仰、偏航)。 姿态的数据来源有5个:重力、地磁、陀螺仪、加速度计、电子罗盘。其中前两个来自地面坐标系,后三个来自机体坐标系。 - 四元数
在复数域里面,二维坐标通过对复数的加减乘除运算可以快速方便地表达出来,尤其是旋转。现在考虑三维空间的复数向量的拉伸和旋转,或者更高维度。那么就需要一个复数域坐标系,容易想到的形式就是h=a+bi+cj,事实证明在二维复数域里面简单添加一元j是无法构成三维复数空间的,实际上需要四个参数才能够构建三维复数空间(两个变量决定轴的方向,一个变量决定旋转角度,一个变量决定伸缩比例),即: q = w + x ∗ i + y ∗ j + z ∗ k q=w+x∗i+y∗j+z∗k q=w+x∗i+y∗j+z∗k
为什么姿态解算要用到四元数呢?这是因为欧拉角表示姿态会有万向节死锁问题,且运算比较复杂,所以一般处理数据时会使用四元数,处理完后再把四元数转换成欧拉角。 - 四元数求解
采用四元数对飞行器进行姿态解算,只需要在每个时钟采样周期循环迭代运算出新的四元数,就可以求得欧拉角信息。在此,构建四元数关于时间的微分方程,来研究四元数的变化规律。
由于载体的运动,四元数Q是变量,即q0、q1、q2、q3是时间的函数,刚体绕瞬时转轴ve转过θ角,其中上标e代表earth地理坐标系,上标b为机体坐标系,四元数为:
对时间进行微分后可用一阶龙格库塔法求解出四元微分方程,最终得到互补滤波后的四元数,然后将四元数转换为欧拉角。
此处参考:无人机姿态解算
2.2 互补滤波算法理论推导
参考:四旋翼姿态解算——互补滤波算法及理论推导
3 示例代码(基于i.MX.RT1064逐飞库)
3.1 初始化
笔者使用的是硬件SPI通信,SPI底层代码就不贴出了。
- 陀螺仪自检函数
void icm20602_self3_check(void)
{
uint8 dat=0;
while(0x12 != dat) //读取ICM20602 ID
{
icm_spi_r_reg_byte(ICM20602_WHO_AM_I, &dat);
systick_delay_ms(10);
//卡在这里原因有以下几点
//1 ICM20602坏了,如果是新的这样的概率极低
//2 接线错误或者没有接好
//3 可能你需要外接上拉电阻,上拉到3.3V
}
}
说明:陀螺仪初始化成功的话,可以从ICM20602_WHO_AM_I寄存器(0x75)读出8 bits 设备ID(与设备地址不是同一个概念),默认值即可0x12,反之初始化失败。
- 初始化函数
void icm20602_init_spi(void)
{
uint8 val = 0x0;
systick_delay_ms(10); //上电延时
(void)spi_init(SPI_NUM, SPI_SCK_PIN, SPI_MOSI_PIN, SPI_MISO_PIN, SPI_CS_PIN, 3, 10*1000*1000);//硬件SPI初始化
icm20602_self3_check();//检测
icm_spi_w_reg_byte(ICM20602_PWR_MGMT_1,0x80);//复位设备
systick_delay_ms(2);
do
{
//等待复位成功
icm_spi_r_reg_byte(ICM20602_PWR_MGMT_1,&val);
}while(0x41 != val);
icm_spi_w_reg_byte(ICM20602_PWR_MGMT_1, 0x01); //时钟设置
icm_spi_w_reg_byte(ICM20602_PWR_MGMT_2, 0x00); //开启陀螺仪和加速度计
icm_spi_w_reg_byte(ICM20602_CONFIG, 0x01); //176HZ 1KHZ
icm_spi_w_reg_byte(ICM20602_SMPLRT_DIV, 0x07); //! FCHOICE_B[1:0]位为0, 且SMPLRT_DIV > 7,所以不分频。即分频系数不起作用,所以采样频率 = 1K
//! 采样速率 SAMPLE_RATE = INTERNAL_SAMPLE_RATE / (1 + SMPLRT_DIV)
icm_spi_w_reg_byte(ICM20602_GYRO_CONFIG, 0x18); //±2000 dps
icm_spi_w_reg_byte(ICM20602_ACCEL_CONFIG, 0x10); //±8g
icm_spi_w_reg_byte(ICM20602_ACCEL_CONFIG_2, 0x03); //Average 4 samples 44.8HZ //0x23 Average 16 samples
}
说明:六轴采样频率初始化为1K(采样周期为0.001s),陀螺仪测量范围为±2000 dps ,对应灵敏度为16.4 LSB/dps;加速度计测量范围为±8g, 对应灵敏度为4096 LSB/g。
3.2 读取六轴数据
- 读取陀螺仪
void get_icm20602_accdata_spi(void)
{
struct
{
uint8 reg;
uint8 dat[6];
}buf;
buf.reg = ICM20602_ACCEL_XOUT_H | ICM20602_SPI_R;
icm_spi_r_reg_bytes(&buf.reg, 7);
icm_acc_x = (int16)(((uint16)buf.dat[0]<<8 | buf.dat[1]));
icm_acc_y = (int16)(((uint16)buf.dat[2]<<8 | buf.dat[3]));
icm_acc_z = (int16)(((uint16)buf.dat[4]<<8 | buf.dat[5]));
}
- 读取加速度计数据
void get_icm20602_gyro_spi(void) { struct { uint8 reg; uint8 dat[6]; }buf; buf.reg = ICM20602_GYRO_XOUT_H


