基于DnCNN的图像和视频去噪
时间:2022-09-14 10:00:00
点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达简介
随着数字图像数量的增加,对高质量图像的需求也在增加。然而,现代相机拍摄的图像会因噪音而退化。图像中的噪声是图像中颜色信息的扭曲,噪声是指数字扭曲。当图像在夜间拍摄时变得更加嘈杂。该案例试图建立一个预测模型,将噪声图像作为输入和输出噪声后的图像。
使用深度学习
基于计算机视觉,CNN深度学习技术的进步可以为图像去噪提供最先进的性能性能像去噪模型的实施是DnCNN(去噪卷积神经网络)。
数据集
BSD300和BSD500数据集均用作训练数据,BSD68用于验证数据。每个图像使用4次,即缩放到[1.0,0.7,0.8,0.7]。
每个缩放图像分成500x50块,步幅20。每个补丁在[1、55]之间增加了标准偏差的高斯噪声。数据生成代码如下:
#Fix Noise stddevs = np.random.uniform(1, 55.0, 125000)[:, np.newaxis, np.newaxis, np.newaxis] noise = np.random.normal(loc = 0, scale=stddevs, size=(125000, 50, 50, 3)).astype(np.float16) def get_dataset(img_path): def image_generator(): patch_size = 50 stride = 20 index = 0 for scale in [1, 0.9, 0.8, 0.7]: for path in img_path: true_img = cv2.imread(path) for i in range(0, true_img.shape[0] - patch_size 1, stride): for j in range(0, true_img.shape[1] - patch_size 1, stride): Y = true_img[i:i patch_size, j:j patch_size] gauss_noise = noise[index].astype(np.float32) X = np.clip(Y gauss_noise, 0, 255.0) index = (index 1)5000 yield (X/255.0,),Y/255.0 return tf.data.Dataset.from_generator(image_generator, output_signature=((tf.TensorSpec(shape=(None, None, 3)),), (tf.TensorSpec(shape=(None, None, 3)))))DnCNN体系结构
DnCNN层有三种类型:
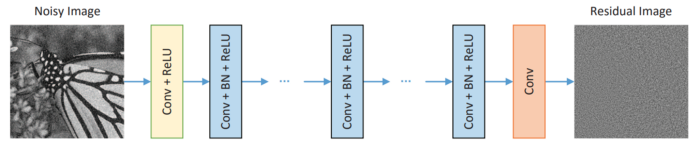
Conv ReLU:过滤器尺寸为3,过滤器数量为64,步骤为1。卷积后的输出形状采用零填充保持ReLU作为激活函数。输出为形状(批量大小,50、50、64)
Conv 批量归一化 ReLU:过滤器大小为3,过滤器数量为64,步长为1,采用零填充保持卷积后的输出形状,采用批量归一化层更好地收敛,ReLU作为激活函数。输出为形状(批次大小,50、50、64)。
Conv:滤镜大小为3,步骤为1,滤镜数量为1c(3个彩色图像,1个灰度图像),卷积后用零填充保持输出形状。输出形状为(批次大小,50,50,c)。
DnCNN模型的输出是残余图像。因此,原始图像=噪声图像-残差图像。
在DnCNN在每层积累前填充零,以确保中间层的每个特征地图与输入图像的大小相同。根据本文,简单的零填充策略不会导致任何边界伪影。
本文建议深度为17,但本案例研究适用于深度为12和8。
评价指标
评估指标是PSNR(峰值信噪比)分数。它只是一个值,表示结构的去噪图像比原始图像好。
模型训练
def get_model(depth, channels): noise_inp = tf.keras.layers.Input(shape = (50, 50, channels), dtype=tf.float32) init = 'Orthogonal' y = tf.keras.layers.Conv2D(filters = 64, kernel_size = 3, padding = 'same', kernel_initializer=init, use_bias=True)(noise_inp) y = tf.keras.layers.ReLU()(y) for i in range(1, depth-1): y = tf.keras.layers.Conv2D(filters = 64, kernel_size = 3, padding = 'same', kernel_initializer=init, use_bias=True)(y) bn = tf.keras.layers.BatchNormalization(axis=-1, epsilon=1e-5, momentum=0.9) y = bn(y) y = tf.keras.layers.ReLU()(y) residual = tf.keras.layers.Conv2D(filters = channels, kernel_size = 3, padding = 'same', kernel_initializer=init, use_bias=True)(y) true_img = tf.keras.layers.Subtract()([noise_inp, residual]) model = tf.keras.Model(inputs = [noise_inp], outputs=[true_img]) model.compile(optimizer=tf.keras.optimizers.Adam(), loss='mse') return model def lr_decay(epoch): lr = 1e-3 if epoch 1 > 20: lr/=30 elif epoch 1 > 10: lr /= 10 return lr model = get_model(8, 3) lr_callback = tf.keras.callbacks.LearningRateScheduler(lr_decay) dataset = get_dataset(bsd500).shuffle(1000).batch(128).prefetch(tf.data.experimental.AUTOTUNE).repeat(None) model.compile(optimizer=tf.keras.optimizers.Adam(), loss='mse') history = model.fit(x = dataset, steps_per_epoch=2000, epochs=30, shuffle=True,verbose=1, callbacks=[lr_callback])批量大小=128,每个历元的步数=2000,历元数=30。
结果
BSD68数据集上的峰值信噪比为标准差25~28.标准差50~25。
如果深度=12,则BSD68数据集上的峰值信噪比标准差为25.30标准差50为26.13。
应用:视频去噪
我们可以将这个想法扩展到视频帧,并将每个帧作为输入传递给视频帧DnCNN模型,生成的帧传输给视频编写器。
import sys import tensorflow as tf import numpy as np import cv2 import time import matplotlib.pyplot as plt import os import glob import seaborn as snb import re from skvideo.io import FFmpegWriter class Denoiser: def __init__(self, merge_outputs): self.model = tf.keras.models.load_model'./model')
self.merge_outputs = merge_outputs
def get_patches(self, frame):
patches = np.zeros(shape=(self.batch_size, 50, 50, 3))
counter = 0
for i in range(0, self.SCALE_H, 50):
for j in range(0, self.SCALE_W, 50):
patches[counter] = frame[i:i+50, j:j+50]
counter+=1
return patches.astype(np.float32)
def reconstruct_from_patches(self, patches, h, w, true_h, true_w, patch_size):
img = np.zeros((h,w, patches[0].shape[-1]))
counter = 0
for i in range(0,h-patch_size+1,patch_size):
for j in range(0,w-patch_size+1,patch_size):
img[i:i+patch_size, j:j+patch_size, :] = patches[counter]
counter+=1
return cv2.resize(img, (true_w, true_h), cv2.INTER_CUBIC)
def denoise_video(self, PATH):
self.cap = cv2.VideoCapture(PATH)
self.H, self.W = int(self.cap.get(4)), int(self.cap.get(3))
self.SCALE_H, self.SCALE_W = (self.H//50 * 50), (self.W//50 * 50)
self.batch_size = ((self.SCALE_H * self.SCALE_W) // (50**2))
outputFile = './denoise.mp4'
writer = FFmpegWriter(
outputFile,
outputdict={
'-vcodec':'libx264',
'-crf':'0',
'-preset':'veryslow'
}
)
while True:
success, img = self.cap.read()
if not success:
break
resize_img = cv2.resize(img, (self.SCALE_W, self.SCALE_H), cv2.INTER_CUBIC).astype(np.float32)
noise_img = resize_img/255.0
patches = self.get_patches(noise_img).astype(np.float32)
predictions = np.clip(self.model(patches), 0, 1)
pred_img = (self.reconstruct_from_patches(predictions, self.SCALE_H,
self.SCALE_W, self.H, self.W, 50)*255.0)
if self.merge_outputs:
merge = np.vstack([img[:self.H//2,:,:], pred_img[:self.H//2,:,:]])
writer.writeFrame(merge[:,:,::-1])
else:
writer.writeFrame(pred_img[:,:,::-1])
writer.close()
PATH = sys.argv[1]
print(f"Path is : {PATH}")
denoise = Denoiser(merge_outputs = True)
x = denoise.denoise_video(PATH)参考
https://arxiv.org/pdf/1608.03981.pdf
https://www.appliedaicourse.com/
GITHUB代码链接:https://github.com/saproovarun/DnCNN-Keras
小白团队出品:零基础精通语义分割↓↓↓
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

