基于STM32F4的心电监护仪
时间:2022-09-14 09:30:00
基于STM32F4.心电监护仪
-
- 一、硬件设计
- 二、GUI的设计
- 三、导联系统的选择
- 四、心电电极选择
- 五、心电信号时域和频域特征
- 六、软件设计
-
- 6.1.系统总体设计
- 6.2.系统总体设计
- 6.3.心电信号滤波
- 6.4、心率和QRS宽度检测
- 七、实机演示
- 八、总结展望
从题目中可以看出,这个题目来源于题目无线运动传感器节点题无线运动传感器节点设计,这部作品获得了湖北电子竞技二等奖,也是我的本科毕业设计。在这里,我总结了我的心电图工作和我的大学四年。
一、硬件设计
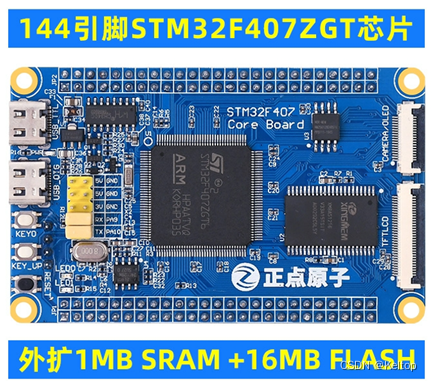
- 处理板的选择
本研究的处理器模块选择正点原子公司STM32F4最小系统板,如图1所示,最小系统板搭载STM32F407ZGT6芯片,并有 192KB的SRAM、1024KB的FLASH、定时器资源丰富(12个16位定时器,2个32位定时器)I/O口、2个DMA还有一个控制器FSMC接口,其中通过FSMC刷屏速度可达3300W像素/秒,此外,板材还扩大了1M字节的SRAM芯片更有利于处理器驱动4.3寸的LCD,这大大加快了心电监测器的刷屏速度,而且STM32F407ZGT这个芯片也集成了FPU和DSP指令可以加快数字滤波器的处理速度,而且最小系统板也会是FSMC接口和其他IO口一起引出。
- 心电采集板—ADS1292R模块的介绍
本研究最重要的方法是心电采集板。心电信号采集板的芯片选择TI公司的ADS1292R,参考外围电路TI绘制公司给出的原理图和建议,如图所示。
关于ADS1292R的外围电路的介绍和使用,这里推荐这篇博文,ADS1292R的使用
- 温度模块----LMT70
采用温度检测模块LMT70温度传感器。其优点是:超小、高精度、低功耗的模拟温度传感器。缺点是:接触式温度传感器,测体表温度有一定误差。但考虑到温度测量的精度和方便性,最终选择LMT70作为温度测量传感器,同时选择ADS1118具有PGA、高精度电压基准,16位ADC对LMT70数据的温度模拟量进行采集。
- 没有屏幕的系统外观
二、GUI的设计
本系统为了更好的人机交互,采用4.3英寸触摸屏搭配开源图形库LVGL,一方面,将显示波形和数据与心电信号的收集和处理隔离开来,另一方面,系统运行界面如下图所示,便于交互和美观。整个界面主要包括菜单、返回、图表、数据栏、导联状态灯、打开心电采集按钮。
通过系统菜单LVGL的roller绘制控件,roller内部选项的事件以回调函数的形式调用。因为选择roller的选项,LVGL会回到选项值,所以我自己设计了函数指针数组注册回调函数,并通过数组调用选定的序号。代码如下:
void (*oper_fuc[4])();//函数指针数组 void Menuitem_Init(void) {
oper_fuc[0]=send_type_server; oper_fuc[1]=Set_chart_div_line; oper_fuc[2]=clear_step; oper_fuc[3]=smooth_filter; } static void roller_event_handler(lv_obj_t * obj, lv_event_t event) {
static unsigned char count=0; if(event==LV_EVENT_VALUE_CHANGED) {
count=
lv_roller_get_selected
(obj
)
;
}
if
(event
==
LV_EVENT_CLICKED
)
{
oper_fuc
[count
]
(
)
;
}
}
roller_event_handler是选中roller中的事件函数,在事件函数里面来回调选项的处理函数。roller中总共写了4个选项,分别为
send_type选择发送类型(支持发送到本地显示或者串口发送给上位机)、set_div_line是否设置图表的等分线、
clear_step清除界面上的数据、
smooth_filter是否进行平滑滤波
本系统还设计导联状态指示灯,前面讨论过ADS1292R可以检测电联的脱落状态,因而这里用LVGL的led控件作为导联的状态指示,当检测到导联接入人体,led控件就会点亮。设计了红心周期性跳动,当检测到导联接入人体后,红心就会周期性跳动,当心电数据采样开始后,红心随着心率值的改变而跳动着。同时还设计了采样开始/停止按钮,可以随时暂停和开始采样心电信号。
除了以上看得见的设计之外,还创建了四个周期性的任务,任务优先级从高到低分别为:更新数据栏里的数据、更新导联状态、检查心电信号的纵轴范围、系统状态的检查。
三、导联体系的选择
心电信号本质上是测量人体体表的电信号,将电极通过一定的导联体系就可以记录到心电图,因而选择合适的电极是观察心电图至关重要的选择。在医学上常见的导联体系分别为标准12导联体系、Lewis导联、Fontaine导联、Cabrera导联、Nehb导联、frank导联、Mason-Likar导联等。标准12导联体系是医院所使用的,它由3个双极肢体导联、6个单极胸前导联、3个单极加压肢体导联所组成。
该系统的主要目的是实时检测心率和QRS宽度,因此选择的导联应该基于能观察心电中R波较大的原则。因而选择标准12导联中标准肢体导联I(见图左),或者Mason-Likar导联(见图右)。
四、心电电极选择
人体的内阻很高,因而心电信号是一个高内阻且幅度很低的信号,如果处理不好就会造成心电信号的衰减,因此就需要从两方面解决:
(1)降低与电极的接触阻抗(2)提高采集电路的输入阻抗。
目前,市面上有三种电极,分别为湿电极、干电极和非接触式电极,这三种电极中湿电极的接触电阻最小,因而对于模拟前端的输入电阻不需要太大。湿电极主要由电极片、Ag/AgCl 涂层、导电胶等物质组成。 医学电极贴片与身体接触的是水凝胶(亲水化合物),“黑色”部分为Ag/AgCl,使用导电金属和导线与仪器连接,实物如图所示。
五、心电信号时域和频域特征
人体的心电信号是一种非平稳、非线性、随机性比较强的微弱生理信号,幅值约为毫伏(mV)级,频率在0.05-100Hz之间。心电信号的每一个心跳循环由一系列有规律的波形组成,它们分别是P波、QRS复合波和T波,而这些波形的起点、终点、波峰、波谷、以及间期分别记录着心脏活动状态的详细信息
心电信号各个波段的详细说明如下:
心电各个波段的功率谱如下:
心电信号的噪声分析如下:
读者想对心电信号进一步了解可以参考如下链接:http://www.mythbird.com/ecgxin-hao-te-zheng/。
六、软件设计
6.1、系统总体设计
系统先从硬件初始化开始,其中包括串口初始化、触摸屏初始化、外部SRAM初始化、ADS1292R初始化、LMT70初始化、LVGL心跳定时器初始化。
其次就是LVGL初始化,主要是一些主题和变量的初始化。然后创建系统的UI界面和一些定时的任务。
最后初始化心电数据缓存、 数字低通滤波器初始化、心率数据缓存初始化。
完成以上的初始化,系统便进入主循环,等待心电数据输入缓存中出现数据,随后开始滤波,将滤波之后的数据写入心电输出缓存中,然后轮询LVGL的任务和触摸屏扫描。就这样不停地循环。其中心电输入缓存中的数据是通过中断从ADS1292R的输出引脚中读取,而心电输出缓存则是原始数据经过低通处理后的数据,等待LVGL显示任务的到来并显示在触摸屏上。系统总体框图和软件框图如下所示
6.2、系统总体设计
在前面讨论过心电信号频谱和噪声,因而要对心电信号进行滤波,为了同时实现心电信号的实时滤波和心电波形实时显示,所以有必要设计一个缓存区来解决这个难题。这里我打算用我自己设计的两个循环队列解决这个难题。
为了使得在滤波的时候,心电数据依然能够采集,设计两个循环队列,如上图所示,其中IN_Buffer和OUT_Buffer的每个矩形框表示25x4个字节的空间,这取决一次需要多少字节的数据滤波。这里一次滤波需要25个int型的数据,因而每个缓存需要25x4字节。图中的蓝色填充表示缓存区中填满了数据,每次读完数据之后都需要切换缓存区,且IN_Buffer和OUT_Buffer的读写操作相反,即IN_Buffer的读操作是OUT_Buffer的写操作,程序框图如下图所示。
图上所示的三个程序均是并行处理的,
程序1是通过外部中断的服务函数调用的,
程序2则是在UI画图程序里面通过定时器周期性的调用,
程序3则是在主程序中的滤波函数里面调用
程序1代码如下(ADS1292R采用中断方式读取数据):
void EXTI9_5_IRQHandler(void)
{
if(EXTI->IMR&EXTI_Line5 && ADS_DRDY==0)//数据接收中断
{
ADS1292_Read_Data(ads1292_Cache);//数据存到9字节缓冲区
Update_ECG_Data(ads1292_Cache);
Cheack_lead_stata(ads1292_Cache);
if(state_pcb.SampleStartFlag==true)
WriteAdsInBuffer(ecg_info.ecg_data);//数据写入缓存区
}
EXTI_ClearITPendingBit(EXTI_Line5);
}
程序2代码如下(LVGL的心跳在定时器中周期调用,同时程序2也在其中运行,主要从滤波后的数据缓存中取出数据进行波形显示):
void Wave_show(void)
{
int value=0;
if(ReadEcgOutBuffer(&value)!=0) {
if(ecg_graph.send_type==GRAPH) {
ecg_graph.y_pose=Transf_EcgData_To_Vert(value,ecg_graph.sacle);
chart_add_data(ecg_graph.y_pose);
set_data_into_heart_buff(ecg_graph.y_pose);
} else if(ecg_graph.send_type==USART) {
//EcgSendByUart(value);
printf("%d\r\n",(int)alg(value/200));
}
}
}
//定时器3中断服务程序
void TIM3_IRQHandler(void)
{
static u8 show_cnt=0;
if(TIM3->SR&TIM_IT_Update)//溢出中断
{
show_cnt++;
lv_tick_inc(1);//lvgl的1ms心跳
if(show_cnt==3){
show_cnt=0;
Wave_show();
}
}
TIM3->SR = (uint16_t)~TIM_IT_Update;
}
程序3代码如下(在滤波函数中调用,用于承上启下,即从IN缓存中取出数据,滤波之后写入OUT缓存中):
void arm_fir_f32_lp(void)
{
float32_t *inputf32, *outputf32;
if(ReadAdsInBuffer() && WriterEcgOutBuffer()){
//指针定位成功
/* 初始化输入输出缓存指针 */
inputf32 = (float32_t *)InFifoDev.rp;
outputf32 =(float32_t *)OutFifoDev.wp;
/* 实现FIR滤波 */
arm_fir_f32(&S, inputf32, outputf32, BLOCK_SIZE);
//my_memcpy(OutFifoDev.wp,InFifoDev.rp,BLOCK_SIZE*4);
InFifoDev.state[InFifoDev.read_front]=Empty;
InFifoDev.read_front=(InFifoDev.read_front+1)%PACK_NUM;//切换读缓存块
OutFifoDev.state[OutFifoDev.writer_rear]=Full;
OutFifoDev.writer_rear=(OutFifoDev.writer_rear+1)%PACK_NUM;//切换写缓存块
}
}
关于缓存切换代码如下:
static void WriteAdsInBuffer(int date)
{
static u8 cnt=0;
if(InFifoDev.state[InFifoDev.writer_rear]==Empty){
//缓存块可写
InFifoDev.wp=&AdsInBuffer[InFifoDev.writer_rear*(BLOCK_SIZE)];//将写指针定位写缓存块
InFifoDev.wp[cnt++]=date;
if(cnt==BLOCK_SIZE){
cnt=0;
InFifoDev.state[InFifoDev.writer_rear]=Full;
InFifoDev.writer_rear=(InFifoDev.writer_rear+1)%PACK_NUM;//切换写缓存块
}
}
}
//定位读指针
//成功则返回1,不成功则返回0
u8 ReadAdsInBuffer(void)
{
if(InFifoDev.state[InFifoDev.read_front]==Full){
//缓存块可读
InFifoDev.rp=&AdsInBuffer[InFifoDev.read_front*(BLOCK_SIZE)];//将读指针定位读缓存块
return 1;
}
return 0;
}
//定位读指针
u8 WriterEcgOutBuffer(void)
{
if(OutFifoDev.state[OutFifoDev.writer_rear]==Empty){
//缓存块可写
OutFifoDev.wp=&EcgOutBuffer[OutFifoDev.writer_rear*(BLOCK_SIZE)];//将读指针定位读缓存块
return 1;
}
return 0;
}
//成功则返回1,不成功则返回0
u8 ReadEcgOutBuffer(int32_t *p)
{
static u8 cnt=0;
if(OutFifoDev.state[OutFifoDev.read_front]==Full){
//缓存块可读
OutFifoDev.rp=&EcgOutBuffer[OutFifoDev.read_front*(BLOCK_SIZE)];//将写指针定位读缓存块
*p=OutFifoDev.rp[cnt++];
if(cnt==BLOCK_SIZE){
cnt=0;
OutFifoDev.state[OutFifoDev.read_front]=Empty;
OutFifoDev.read_front=(OutFifoDev.read_front+1)%PACK_NUM;//切换写读缓存块
}
return 1;
}
return 0;
}
6.3、心电信号滤波
- 工频噪声滤除
滤除工频噪声的数字滤波算法主要有经典滤波器、小波变换、自适应滤波。小波变换能将心电信号进行多层分解,可以使得心电信号与工频噪声分离,但是计算量大,所占用的中间变量也比较多,对于单片机来说,处理的速度也不够快,因而对于系统的实时性这一指标很难实现。自适应滤波能够自动跟踪工频噪声的改变,但是需要增加一个输入信号作为参考,因而增加了系统的复杂性。在前面也讨论过心电信号95%的能量都是集中在0~40Hz,而工频噪声则在50Hz左右,过渡带比较宽,因而可以选择截止频率为40Hz的低通滤波器。
该低通滤波器利用MATLAB的FDATOOL生成,只需要选择低通滤波器是FIR结构,选择Blackman-Harris窗函数,滤波器的阶数定为50,选择采样频率为250Hz,截止频率为40Hz,参数如下图所示:
然后利用FDATOOL生成的冲激响应的数组,选择ARM官方的DSP库,调用arm_fir_f32函数,既可以完成一次滤波。但是在这之前,需要调用arm_fir_init_f32进行初始化。
滤波器系数如下:
const float32_t fir32LP[NUM_TAPS] = {
-7.484454468902e-22,-3.269336712398e-06,-1.365915864079e-05,-5.014073980636e-06,
6.804735231975e-05,0.0001662336497003,7.965197426322e-05,-0.0003784662837741,
-0.0008928563387901,-0.0005280588787408, 0.001284875839485, 0.003225662215767,
0.0022425431358,-0.003157084585057,-0.009028737319977,-0.007219934929014,
0.006057868257093, 0.02144319498633, 0.01971312591228,-0.009448071870685,
-0.04806332586811, -0.05291973061693, 0.01224382260678, 0.1388254178822,
0.2663085232723, 0.3199984843521, 0.2663085232723, 0.1388254178822,
0.01224382260678, -0.05291973061693, -0.04806332586811,-0.009448071870685,
0.01971312591228, 0.02144319498633, 0.006057868257093,-0.007219934929014,
-0.009028737319977,-0.003157084585057, 0.0022425431358, 0.003225662215767,
0.001284875839485,-0.0005280588787408,-0.0008928563387901,-0.0003784662837741,
7.965197426322e-05,0.0001662336497003,6.804735231975e-05,-5.014073980636e-06,
-1.365915864079e-05,-3.269336712399e-06,-7.484454468902e-22
};
static float32_t firStateF32[BLOCK_SIZE + NUM_TAPS - 1];
arm_fir_instance_f32 S;
void arm_fir_Init(void)
{
arm_fir_init_f32(&S, NUM_TAPS, (float32_t *)&fir32LP[0], &firStateF32[0], BLOCK_SIZE);
}
滤波函数见程序3(往上找)
- 基线漂移
基线漂移与工频噪声不同,它是由于呼吸和电极滑动变化所异致的,其频率一般低于1Hz左右。常见对于基线漂移滤除的数字算法有高通滤波器、中值滤波、小波变换、形态学滤波、曲线拟合等,其中高通滤波器可能会对心电信号的ST波段产生影响,毕竟基线漂移的频率也在ST波段里面。曲线拟合对较大的基线漂移处理能力较弱,处理的效果与处理数据的长度成正相关,因而不适用实时处理的系统。小波变换计算量大,也不适用实时处理的系统。相比之下,形态学滤波对心电信号的基线漂移滤除效果更好,计算量也比中值滤波小。但是形态学滤波要求数据长度足够长,因而会改变前面的缓存结构,并且在本系统中并未太严重的基线漂移,系统的任务也比较多,多方面权衡之下,选择不处理基线漂移。
- 肌电噪声的抑制
肌电噪声主要是由于人体肌肉颤抖导致体表的电位发生变化,这种噪声通过电极贴传导至心电模拟前端,并且这种噪声持续时间较短,使得ECG信号波形产生细小的波纹,这种噪声频率分布比较广,前面已经将心电信号通过截止频率为40Hz的低通滤波器,因而需要5点平滑滤波将细小的波纹滤除,为了不影响心电信号的实时处理,因而改进版的平滑滤波器代码如下:
/* * 滑动平均值滤波。 * 每调用一次,就加入一个新数据,并得到当前的滤波值。 */
float alg(float new_val)
{
/* 用一个减法,就做了"丢弃最旧的数据,加入最新的数据"这一操作 */
sum += (new_val - buf[pos]);
buf[pos] = new_val;
pos = (pos + 1) % MAX_COUNT;
/* 个数不足时,cnt是实际个数,个数足够时,cnt最多也只是MAX_COUNT */
pcnt += (pcnt < MAX_COUNT);
return sum / MAX_COUNT;
}
6.4、心率和QRS宽度检测
心率和QRS宽度检测作为本系统的算法核心,有了心率值和QRS宽度值才能进一步判断常见的心律失常。心率基本上都是检测两个R波之间的时隙来计算的,常见检测R的算法主要有阈值法、模板法和语句描述法。
而本系统的心率和QRS宽度检测算法是在一起检测的,所采用的算法是幅度阈值检测和差分检测相结合,因为观察心电信号的R波,发现R波是具有窄的脉冲,且脉冲的幅度是心电信号最高的,因而采用幅度和一阶差分共同约束找到R波,同时在找R波的同时还可以估计出QRS的宽度,算法的框图如图
心率检测和QRS宽度检测算法是采用状态机的编程思想,通过R波幅度大且从Q到R一直递增,并且R波到S波的一阶差分值很大,从而将R波定位出来,检测两个R波之前的时间,然后通过如下公式就可以计算出心率:
H R = ( 60 ∗ S a m p l e R a t e ) / c o u n t HR=(60*SampleRate) /count HR=(60∗SampleRate)/count
而QRS宽度则是由
Q R S = Q R S c n t ∗ 2.2 ∗ 1000 / ( S a m p l e R a t e ) QRS=QRScnt*2.2* 1000/(SampleRate) QRS=QRScnt∗2.2∗1000/(SampleRate)
上式中的2.2是估计值,因为QRS_cnt是在检测到R波之后才开始计数,并且未到S波谷停止计数,观察QRS波,发现Q到R与R到S近似对称,因而采用2.2这个估计值,这也是实时检测的缺陷,检测的样本不多。
心率算法和QRS宽度检测代码如下:
/** * @Brief 测量心率 * @Call * @Param * @Note * @Retval */ void ecg_heart_rate(int data) { int Signal=data; if(Signal>hr.vmax) hr.vmax=Signal; if(Signal<hr.vmin) hr.vmin=Signal; thresh=hr.vmax-(hr.vmax-hr.vmin)/5; for( uint16_t i = 0; i <= DATA_NUM_CAL_HR - 2; i++ ) { DataArrayCalHR[i] = DataArrayCalHR[i + 1]; } DataArrayCalHR[DATA_NUM_CAL_HR - 1] = Signal; Diff_Arrray( DiffDataArrayCalHR, DataArrayCalHR, DATA_NUM_CAL_HR ); //差分 if(hr.flag==StartDetected){ uint8_t FlagAllDiffRise = true; for( uint16_t i = 0; i <= DATA_NUM_CAL_HR - 2; i++ ) //判断波形是否一直上升 { if( DiffDataArrayCalHR[i] <= 0 ) { FlagAllDiffRise = false; break; } } if(FlagAllDiffRise==true){ hr.flag=QWave; } } else if(hr.flag==QWave)//已经找Q波 { if(DataArrayCalHR[DATA_NUM_CAL_HR-1]>thresh){ if(hr.count>125){ if( hr.firstBeat==true )//如果已经找到 过R波 { hr.rate=(float)60*SAMPLE_RATE/(hr.count); hr.count=0;//清除计数 hr.flag=RWave; QRScntflag=true; } else if(hr.firstBeat==false) { hr.firstBeat=true; hr.count=0;//清除计数 hr.flag=RWave; QRScntflag=true; } } } } else if(hr.flag==RWave ){ if(DiffDataArrayCalHR[0]<-(hr.vmax-hr.vmin)/5){ hr.flag=SWave; } } else 元器件数据手册、IC替代型号,打造电子元器件IC百科大全!


